@Steviegeek seems somehow a 100ms delay being added after chucking, doesn’t explain the one that ended on floor. Better look back at the cli settings for this. I never had that delay before, strange. this 100ms for the motor spin up time (from 1350 to 1950) is fine, and will leave that.
Here are my new settings about to test on the ar wing… yes… in the lounge as always
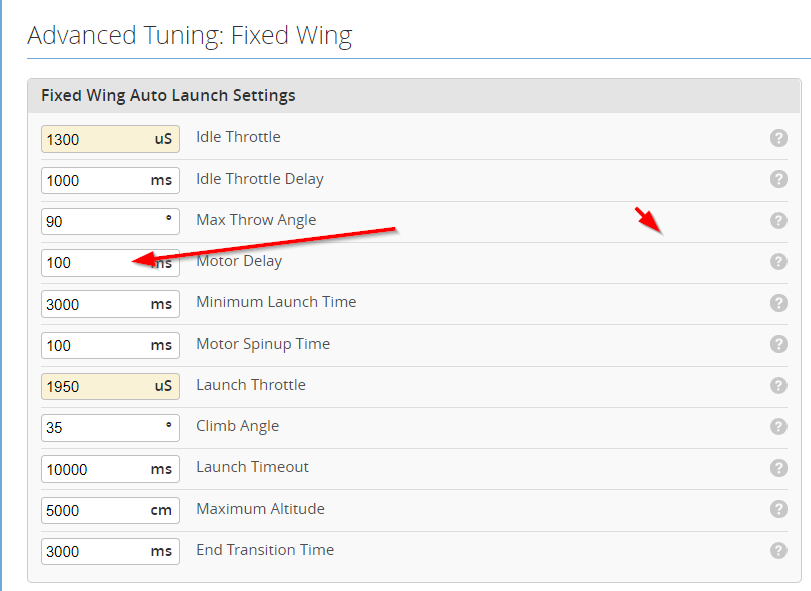
get nav_fw_launch
nav_fw_launch_thr = 1950
Allowed range: 1000 - 2000nav_fw_launch_idle_thr = 1300
Allowed range: 1000 - 2000nav_fw_launch_velocity = 150
Allowed range: 100 - 10000nav_fw_launch_accel = 1500
Allowed range: 1000 - 20000nav_fw_launch_max_angle = 90
Allowed range: 5 - 180nav_fw_launch_detect_time = 40
Allowed range: 10 - 1000nav_fw_launch_idle_motor_delay = 1000
Allowed range: 0 - 60000nav_fw_launch_motor_delay = 0
Allowed range: 0 - 5000nav_fw_launch_spinup_time = 100
Allowed range: 0 - 1000nav_fw_launch_end_time = 3000
Allowed range: 0 - 5000nav_fw_launch_min_time = 2000
Allowed range: 0 - 60000nav_fw_launch_timeout = 5000
Allowed range: 0 - 60000nav_fw_launch_max_altitude = 5000
Allowed range: 0 - 60000nav_fw_launch_climb_angle = 35
Allowed range: 5 - 45nav_fw_launch_manual_throttle = OFF
Allowed values: OFF, ONnav_fw_launch_abort_deadband = 100
Allowed range: 2 - 250
I’m out ATM will check against my default wing settings when I get home ![]()
Cool
Ended up with these!
nav_fw_launch_thr = 1950
Allowed range: 1000 - 2000nav_fw_launch_idle_thr = 1300
Allowed range: 1000 - 2000nav_fw_launch_velocity = 150
Allowed range: 100 - 10000nav_fw_launch_accel = 1250
Allowed range: 1000 - 20000nav_fw_launch_max_angle = 180
Allowed range: 5 - 180nav_fw_launch_detect_time = 40
Allowed range: 10 - 1000nav_fw_launch_idle_motor_delay = 1000
Allowed range: 0 - 60000nav_fw_launch_motor_delay = 20
Allowed range: 0 - 5000nav_fw_launch_spinup_time = 100
Allowed range: 0 - 1000nav_fw_launch_end_time = 3000
Allowed range: 0 - 5000nav_fw_launch_min_time = 2000
Allowed range: 0 - 60000nav_fw_launch_timeout = 5000
Allowed range: 0 - 60000nav_fw_launch_max_altitude = 5000
Allowed range: 0 - 60000nav_fw_launch_climb_angle = 35
Allowed range: 5 - 45nav_fw_launch_manual_throttle = OFF
Allowed values: OFF, ONnav_fw_launch_abort_deadband = 100
Allowed range: 2 - 250
Your nav_fw_launch_timeout = 5000 is low at 5 seconds, maybe you are taking longer with your checks and this times out. I had EXACTLY the same issue so increased this to 15 seconds
This, nav_fw_launch_climb_angle = 35, is a bit steep most INAV devs suggest between 18 and 22
These are my settings for a smallish wing, I have some others for my TBS Caipirinha but that is much heavier with a more powerful motor so I think these are more suited for your AR Wing
feature -FW_LAUNCH
beeper LAUNCH_MODE
beeper LAUNCH_MODE_LOW_THROTTLE
beeper LAUNCH_MODE_IDLE_START
set nav_fw_launch_velocity = 200
set nav_fw_launch_accel = 1400
set nav_fw_launch_max_angle = 180
set nav_fw_launch_detect_time = 10
set nav_fw_launch_idle_motor_delay = 0
set nav_fw_launch_motor_delay = 50
set nav_fw_launch_spinup_time = 100
set nav_fw_launch_end_time = 2000
set nav_fw_launch_min_time = 2000
set nav_fw_launch_timeout = 15000
set nav_fw_launch_max_altitude = 4000
set nav_fw_launch_climb_angle = 22
set nav_fw_launch_manual_throttle = OFF
set nav_fw_launch_abort_deadband = 100
set nav_fw_launch_thr = 1700
set nav_fw_launch_idle_thr = 1250
I thought this was how long to launch for before loitering i.e. post take off
Nah the AR wing goes to moon…might try 90 degrees haha… It’s 20 on the ranger
That reads how long before can wiggle sticks to me. With a loiter set and height this doesn’t matter if low (I’ve now set it to 3seconds on the AR wing…)
re…
- switch to autolaunch
- put the TX on a table
- look around for where you left your goggles
- find the battery for them
- put goggles on
- take goggles off
- check your little HD cameras are recording
- switch on the one you forgot
- put goggles back on, make sure they are comfy.
- double check how many sats you have
- ARM
- raise throttle, wait till props start
- CHUCK
Oh dear, it’s dropped to the ground
Because 5 seconds has passed
Ask Karl, this happened to me numerous times until I sussed WTF was going on
You can exit ‘autolaunch’ anytime by wiggling the pitch/roll stick
My only regret yesterday was when this happened to you, I forgot about my previous experience to tell you then
All this easily checked in your lounge, set switch, wait, shake, see what motor does
This why I set to 15000 (15 seconds)
![]()
See I read that differently… It’s timeout AFTER launch… How long before it goes.to loiter or acro or angle whatever you put on… If what you say is right surely the idle would stop after my 3/5 seconds? Which it didn’t
Also it kicked to full power on ground. I changed my angle from 90 to 180 and lowered the detection speed on the wing
Maybe that was higher inertia of hitting the ground
But was it full power? your idle speed would have done the grass circle thing
I don’t think idle speed stops, it’s set by the throttle stick but limited to the value, but I’ve no testing or experience to confirm my thoughts ![]()
Just try options mate, see what works best for you ![]()
Here are all my settings if you want to compare the craft sizes etc.
Auto Launch Settings All Models
TBS Caipirinha
feature -FW_LAUNCH
beeper LAUNCH_MODE
beeper LAUNCH_MODE_LOW_THROTTLE
beeper LAUNCH_MODE_IDLE_START
set nav_fw_launch_velocity = 100
set nav_fw_launch_accel = 1400
set nav_fw_launch_max_angle = 180
set nav_fw_launch_detect_time = 40
set nav_fw_launch_idle_motor_delay = 0
set nav_fw_launch_motor_delay = 10
set nav_fw_launch_spinup_time = 150
set nav_fw_launch_end_time = 3000
set nav_fw_launch_min_time = 2000
set nav_fw_launch_timeout = 10000
set nav_fw_launch_max_altitude = 4500
set nav_fw_launch_climb_angle = 25
set nav_fw_launch_manual_throttle = OFF
set nav_fw_launch_abort_deadband = 100
set nav_fw_launch_thr = 1800
set nav_fw_launch_idle_thr = 1400
Binary
feature -FW_LAUNCH
beeper LAUNCH_MODE
beeper LAUNCH_MODE_LOW_THROTTLE
beeper LAUNCH_MODE_IDLE_START
set nav_fw_launch_velocity = 200
set nav_fw_launch_accel = 1863
set nav_fw_launch_max_angle = 180
set nav_fw_launch_detect_time = 20
set nav_fw_launch_idle_motor_delay = 0
set nav_fw_launch_motor_delay = 5
set nav_fw_launch_spinup_time = 100
set nav_fw_launch_end_time = 3000
set nav_fw_launch_min_time = 2000
set nav_fw_launch_timeout = 15000
set nav_fw_launch_max_altitude = 4000
set nav_fw_launch_climb_angle = 24
set nav_fw_launch_manual_throttle = OFF
set nav_fw_launch_abort_deadband = 100
set nav_fw_launch_thr = 1800
set nav_fw_launch_idle_thr = 1300
WingWing
feature -FW_LAUNCH
beeper LAUNCH_MODE
beeper LAUNCH_MODE_LOW_THROTTLE
beeper LAUNCH_MODE_IDLE_START
set nav_fw_launch_velocity = 200
set nav_fw_launch_accel = 1400
set nav_fw_launch_max_angle = 180
set nav_fw_launch_detect_time = 10
set nav_fw_launch_idle_motor_delay = 0
set nav_fw_launch_motor_delay = 50
set nav_fw_launch_spinup_time = 100
set nav_fw_launch_end_time = 2000
set nav_fw_launch_min_time = 2000
set nav_fw_launch_timeout = 15000
set nav_fw_launch_max_altitude = 4000
set nav_fw_launch_climb_angle = 22
set nav_fw_launch_manual_throttle = OFF
set nav_fw_launch_abort_deadband = 100
set nav_fw_launch_thr = 1700
set nav_fw_launch_idle_thr = 1250
Mobula
feature -FW_LAUNCH
beeper LAUNCH_MODE
beeper LAUNCH_MODE_LOW_THROTTLE
beeper LAUNCH_MODE_IDLE_START
set nav_fw_launch_velocity = 100
set nav_fw_launch_accel = 1200
set nav_fw_launch_max_angle = 180
set nav_fw_launch_detect_time = 10
set nav_fw_launch_idle_motor_delay = 0
set nav_fw_launch_motor_delay = 50
set nav_fw_launch_spinup_time = 100
set nav_fw_launch_end_time = 1000
set nav_fw_launch_min_time = 2000
set nav_fw_launch_timeout = 15000
set nav_fw_launch_max_altitude = 4000
set nav_fw_launch_climb_angle = 22
set nav_fw_launch_thr = 1700
set nav_fw_launch_idle_thr = 1150
1 Like