I’ve spent quite some time with this thing now, still only indoors, and I’m at the point where I can confidently take off, hover and move around the room, as long as I keep facing the same direction. When I try to yaw, things start getting out of hand, but I’m sure I’ll get there eventually.
Obviously I’m very limited on space in my little semi, but I have a question about what happens when I do inevitably bump into something.
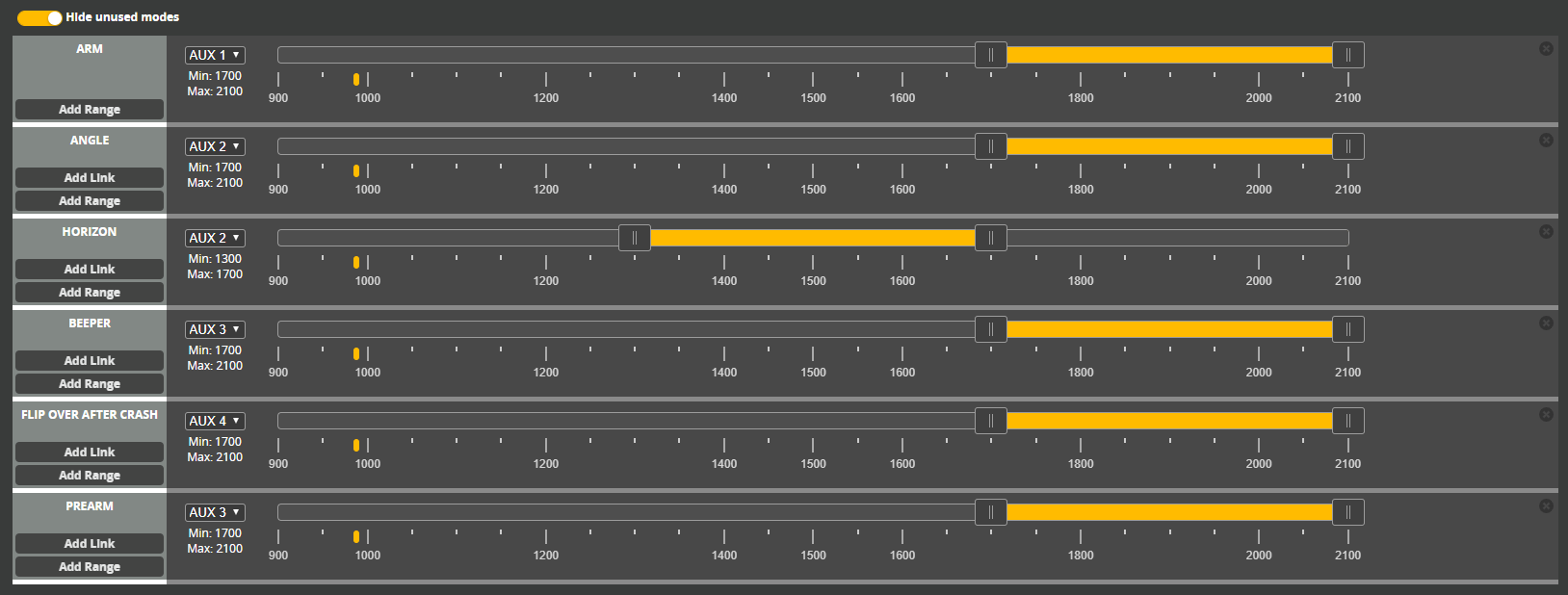
As soon as anything knocks the drone off level flight it seems the motors all go haywire - sounds like they just rev up to the max - and the thing spirals out of control or mashes itself, top-side first, against the wall, without any throttle input from myself. I think I would expect this if I was flying Level or Horizon but as far as I know I’m in Acro. Here’s the modes I have set up in Beta showing my regular flying configuration of the switches.
Yesterday, I picked it up (gingerly) while it was sat idling, tilted it, and I could hear and feel the motors fighting against the movement.
Is this normal, or have I configured it wrong, or is there something more sinister going on? Or is it something that just won’t be an issue once I’m outside the confines of a 15’ square room?
I’ve come really close to buying another FVP just to see if it behaves the same but so far I’ve managed to resist. I mean, I’ve not even started using the goggles on this one yet.
Yes this is normal. In Acro mode the flight controller will try to maintain the attitude of the model when it is subjected to external forces, usually wind but in your example you are the external force.
It can sound counter intuitive but the smaller the quad the harder the flight controller has to work to maintain it’s attitude, I’ve always found, and this could be due to my dodgy nervous system, I have to really dial my movements down when flying a small quad (Whoop size etc), but with larger quads, up to X-Class size, I feel more comfortable and relaxed.
Also double check your channel mapping in the receiver tab, power up the radio and the quad while its attached to betaflight and move your sticks and make sure the correct bars move when you move the sticks. Move your yaw and make sure the bar next yaw moves and the same for the others.
Ah, I was under the impression that Acro was completely manual, with no automated intervention, so that explains it.
And I completely understand that making mechanical systems smaller often makes them harder to control. It’s one of the factors that has tempted me to invest in something a little larger. Although my LiftOff performance suggests it may not be the miracle cure I am looking for.
In this case I am absolutely certain that it’s just my hamfistedness with the control.
And there’s the next thing. I’ve noticed that the camera is on the piss, so I’m going to have to NOT try and keep levelling it.
Honestly, this tendency for it to zoom off as soon as it clips anything is one of the main reasons I haven’t tried it in the garden. Gone in 60 Seconds. But I have been meaning to get to a wide open space soon and have a go there.
I made sure the first few times with the goggles on I took an observer (obvs I do all the time ) simply because they can locate the drone if you crash.
Making unscheduled landings is very much a part of learning FPV - just make sure you have a buzzer activated and a wide-open space.
I always practice over a footy field simply because its easier to find the drone due to the short grass.
When stick is UP and RIGHT both bars should go high, to the right on the screen
When stick is DOWN and LEFT both should go low, to the left.
If not, correct in the TX settings, channel reverse.
That’s for BF and iNav BUT if using Arducopter, The PITCH goes the other direction,
That catches a lot of people out
What Nidge said was correct. It will try to maintain its current attitude (not altitude). Say if the drone is at 45 degrees going forward and you release the sticks, it should stay at 45 degrees. This is the case in full acro. Which is full manual.
The resistance you feel is the gyro compensating. I don’t think there is a quadcopter out there that doesn’t use a gyro.



 ) simply because they can locate the drone if you crash.
) simply because they can locate the drone if you crash.