Hi All
If anyone has the time to look at 2 x blackbox logs it would be a big help.
New 10" build spins up nice and just as it lifts off it trys to visit the moon. This happend twice.
I was in angle mode and i was trying to do a hover test.
Hi All
If anyone has the time to look at 2 x blackbox logs it would be a big help.
New 10" build spins up nice and just as it lifts off it trys to visit the moon. This happend twice.
I was in angle mode and i was trying to do a hover test.
Hmmm…
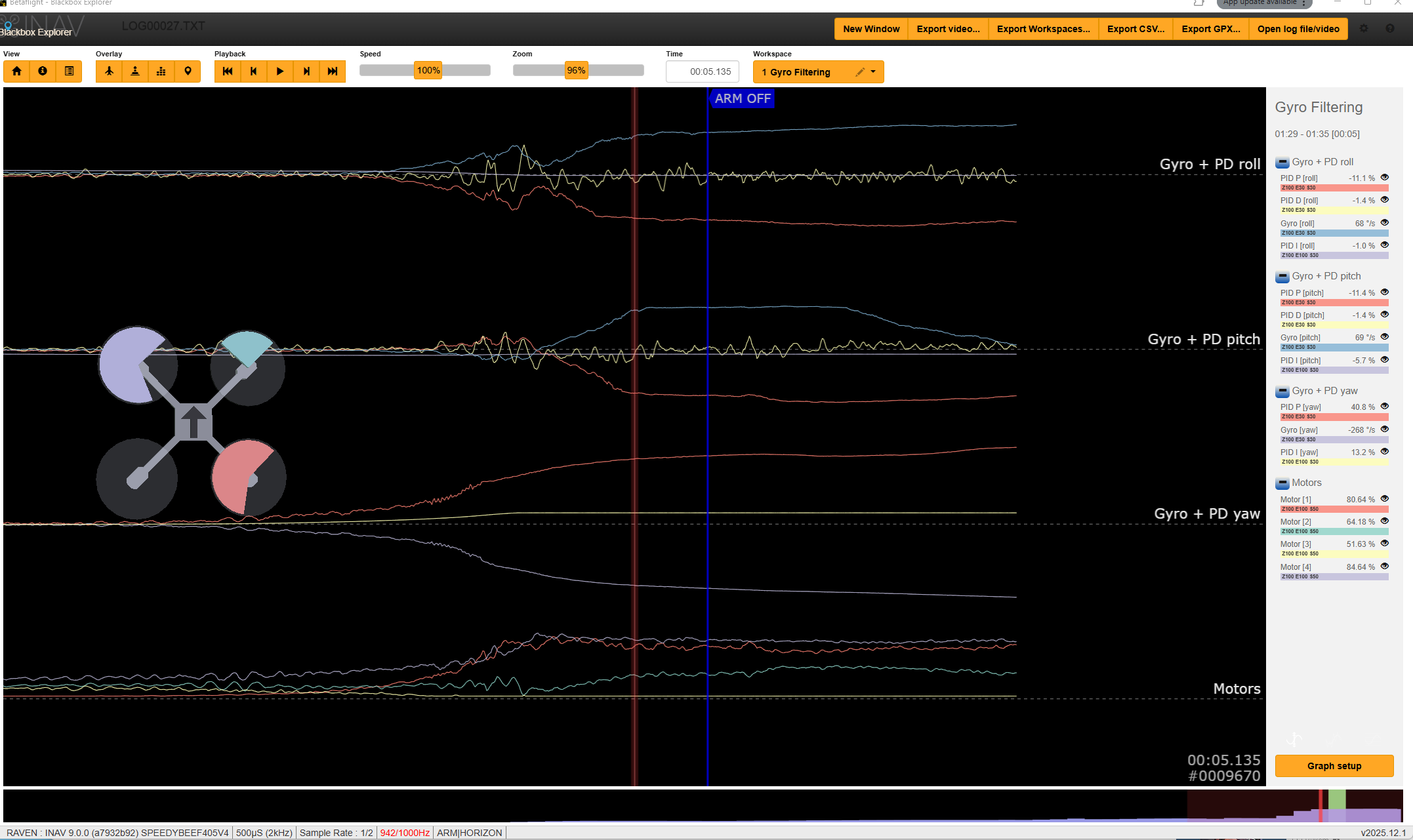
Log 1 – you can see that the gyro tries to correct very quickly - and to do so lowers Motor 1 (while the others are working)
Log 2 – same thing but this time with Motor 3…
As lowered motor is different between the logs - it would suggest you have a wrong config confusing the gyro
.. pretty much all I can think of now ![]()
If this is BFL then you’ve got some serious vibration issues, what’s the frame? Is everything tight and braced?
Lots of free analysing tools
Thanks for the reply all.
Im going to set it back up tonight.
The logs do show a lot of low res noise so ill start there
Cheers
Let us know how it goes
You have some low freq vibrations (seems down to 60Hz-ish) - but I do not believe they are the source of the flyaway’s - you can see in the logs the P-term is maxing out and creating the flyaway (without oscillation) - which is quite odd tbh
If the fly away was the result of the vibrations - you would expect D-term to oscillate wildly and some P-term oscillations.
Good luck ![]()
Thanks for the help guys.
I started a fresh setup in inav and noticed the compass was reversed so corrected that.
Carried out two test flights today 1 in angle and 1 in acro and tested the hold and RTH and both worked well.
I now have tuning to get on with but at least i had no flyaways ![]()
You can see from the link how much oscillation i have.

good stuff ![]()
not tried inav just yet but the tuning process should be very similar to BF (you wanted inav on this one correct?)
Filter setting is super important for big quads (and you really need more of it looking at your flight logs ![]() )
)
Set some conservative filters (it is not uncommon to go as low as 50Hz for 10") - aim is to safely get a full throttle range reading - so you can then analyze the noise signature and reduce the filtering as much as your build allows (less filtering → less latency → better ‘pilot connection feeling’)
The amount of noise in your gyro post filtering will dictate how ‘tight’ you will be able to tune your quad (less noise allows for higher PID gains without motors overheating)
I strongly recommend UAVTech videos for big quad tuning - the BF defaults are really set towards 3-5" builds so defaults do not work well at all with big quads. Inav has a better reputation for big quads but I believe their flight model is not as tight/precise - perfectly fine for normal flying but not as good for ‘acrobatics’.