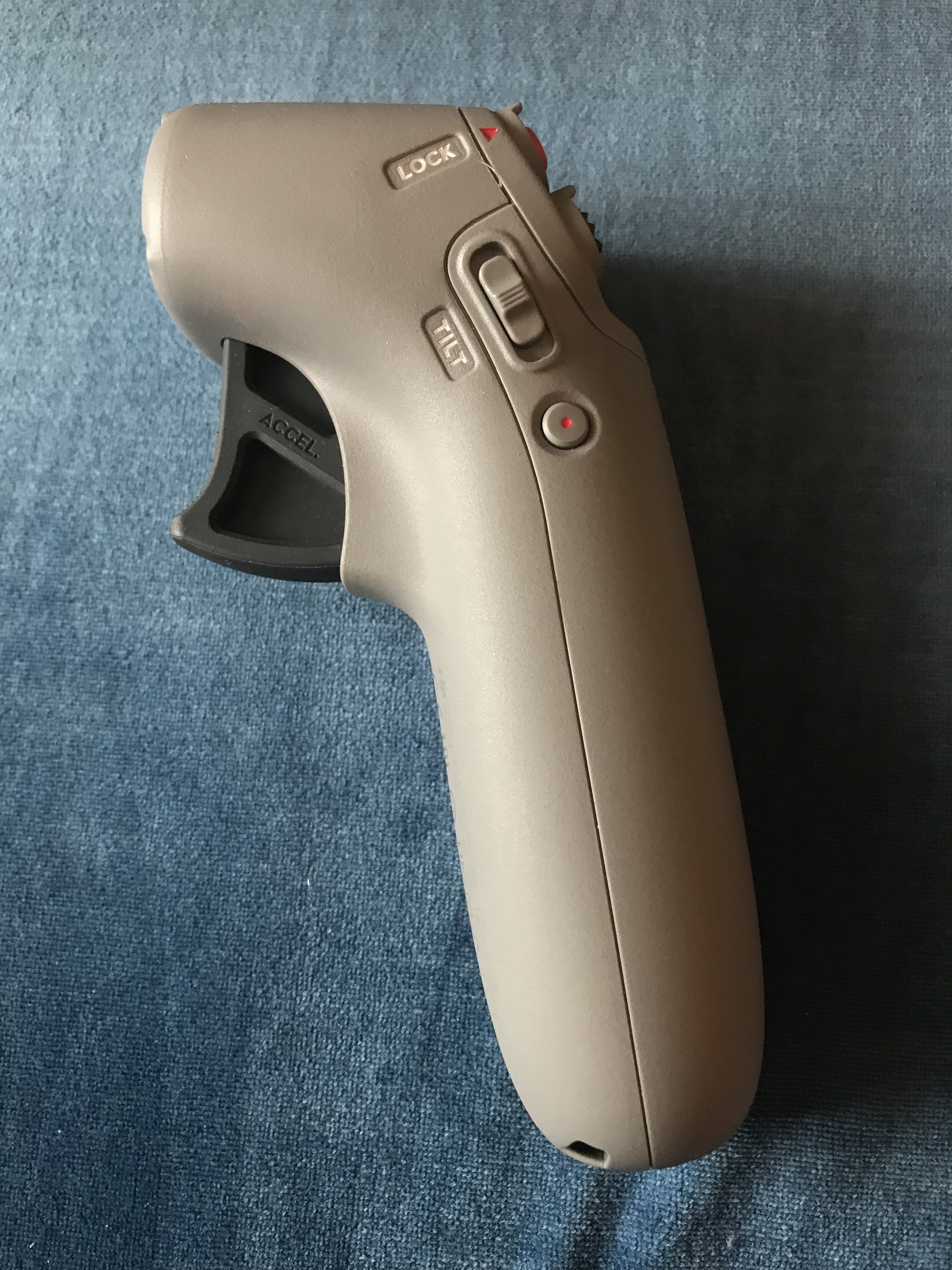
All well and good but I envisage a minor problem as this will be a reasonably tight fit, Yaw, my thoughts are for this part to rotate on it’s axis with the controller in it.
If the controller rotates in Yaw inside, there will be wear and tear on both the motion controller and the PLA socket.
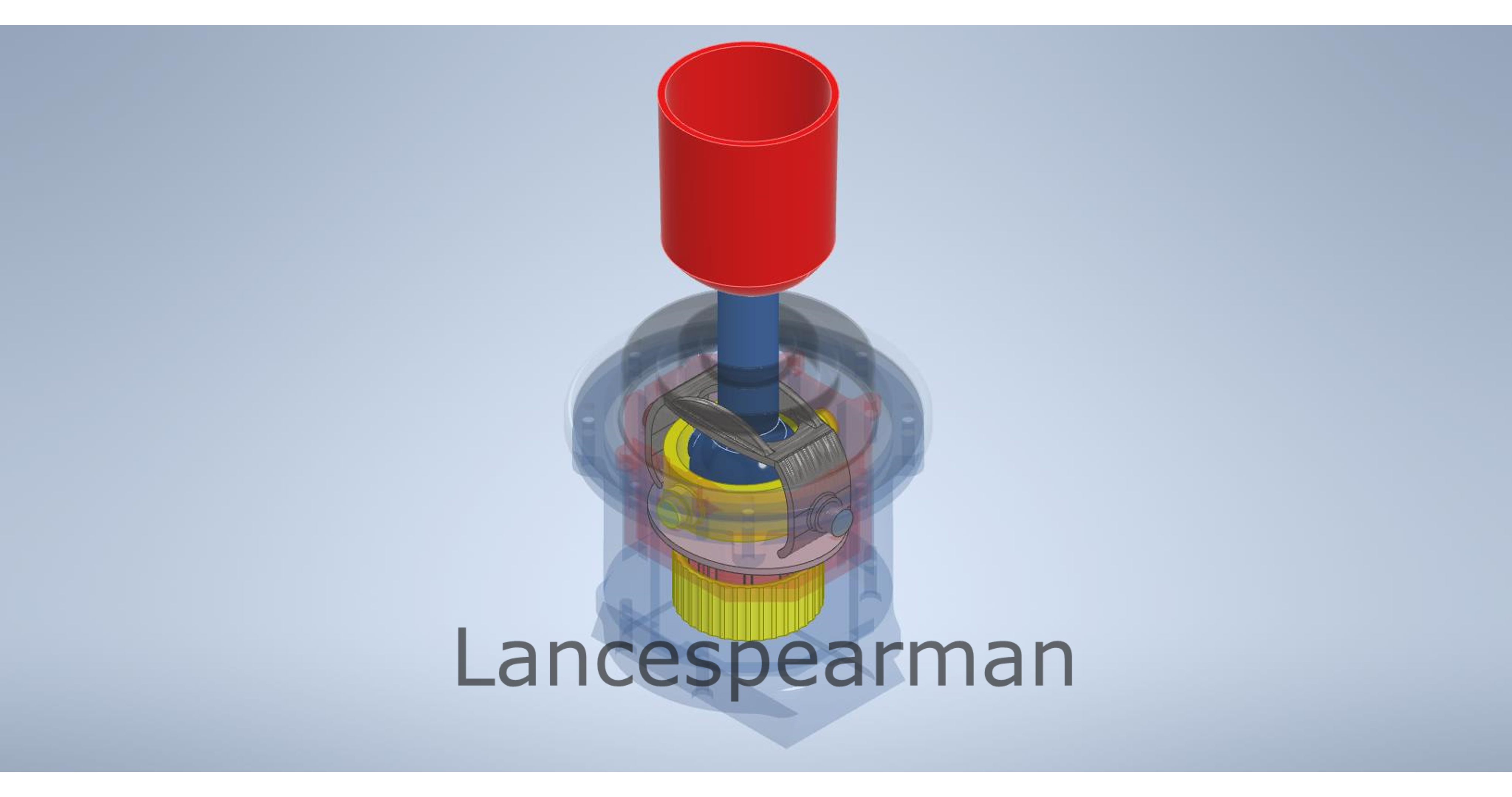
The next phase will be a bit tricky “The gimbal, and Gimbal Housing” for safety the gimbal will have to be self cantering in the event the joystick slips out of your hand.
It’s for Dji FPV and Avata, it’ll make shooting gaps in trees easier
Seriously though, I’ve met a number of people who are terrified of trying FPV because of the controller, they can’t imagine how to coordinate Yaw, Pitch, Roll and Throttle all at the same time.
The gap between the stem and socket is separated by the thrust bearings by 0.2mm which give just the right amount of friction to allow a certain feel to Yaw.