Progress so far
The radio master nano module is working a treat. I managed to use the speedybee app to program the radio master nano module and the speedybee device itself. I then used the wifi from the transmitter and receiver to use the embed web sites on 10.0.0.1 to configure the ELRS system.
Next I watched some videos about LiPo battery care and the Hota D6 Pro charger and charged a battery up at C2 although my battery pack says it will accept a rate of up to C5. I then discovered the battery connect on the volador was a male xt30 connector and the battery connector was a female xt60. Luckily my smoke stopper has both connectors on it so I was able to proceed with testing. I then ordered a set of male to female xt30 to xt60 adapters from amazon which in the conformation email from amazon the picture of the product had been hidden for modesty purposes, because the AI must have thought it was a naughty item! 
I then used betaflight to check the receiver was working and to test the motors. Luckily nothing shorted out and blew up.
I then configured the VTX800 with the EU 5.8Ghz channel data bands file I downloaded off the internet.
I then took out my brand new EACHINE googles and turned them on and I got a picture!
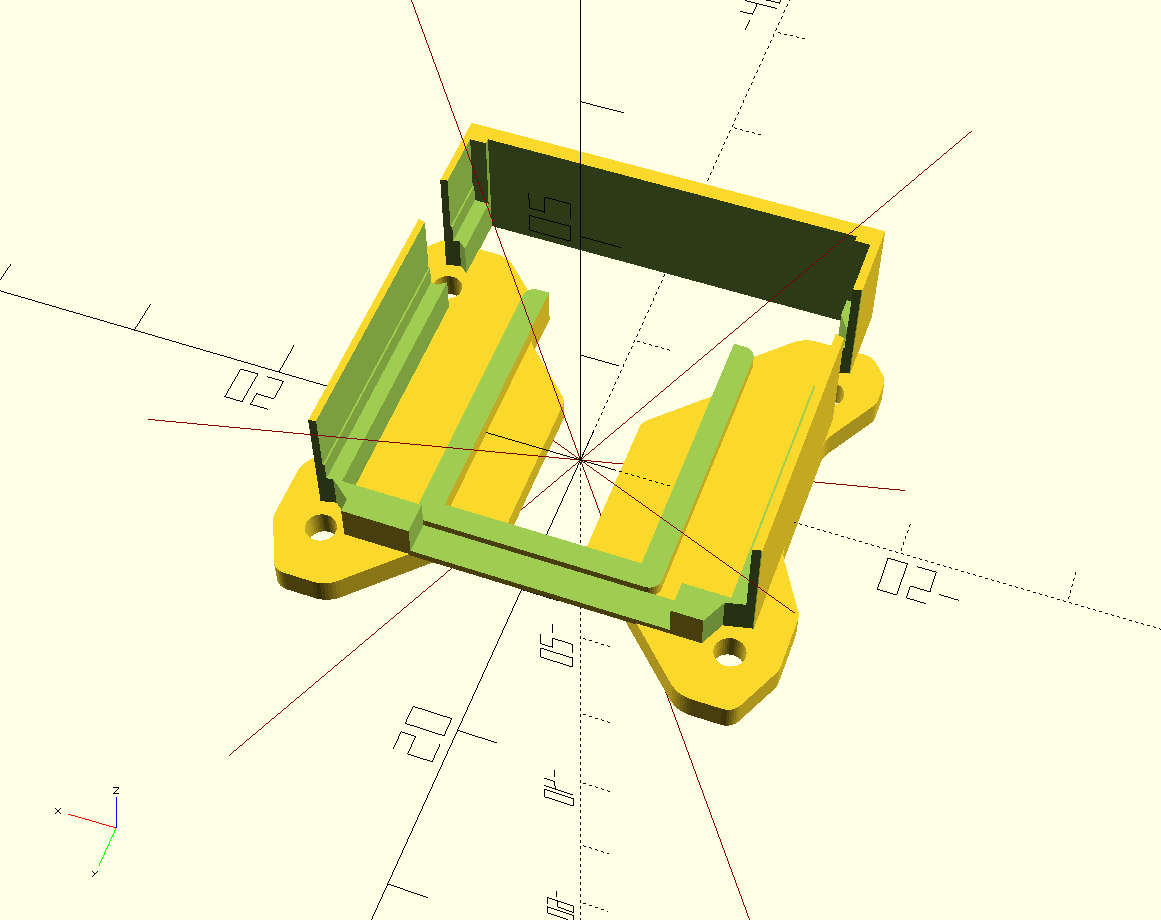
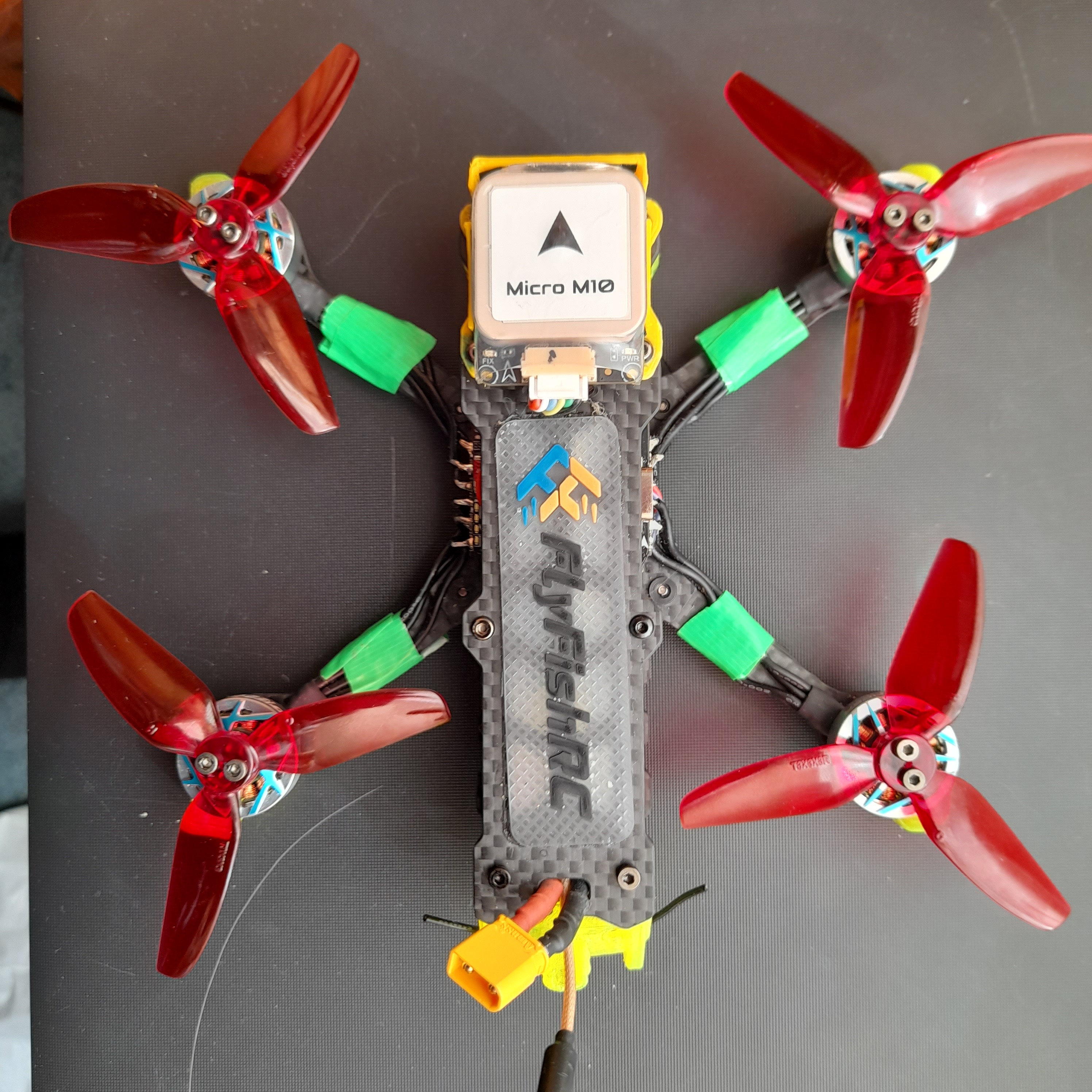
The next thing I did was to install a GPS unit and a buzzer.
Due to space constraints I couldn’t put the GPS unit pointing upwards, but I don’t think it will make too much difference. The GPS appears to be working but I couldn’t get a set of strong signals because of being indoors.
I messed around with the OSD settings and set things up.
So far because the drone in 3" I have struggled to fit the electronics into the frame. The rear aerial caddy is useless because I have been unable to fit any vtx aerial cables through the hole at the back. The hole could have been made bigger or designed slightly differently to allow for this. I might design and 3D print a different one.
I couldn’t use the lollipop aerial I bought in the build because it couldn’t get it to fit in.
The drone weighed in with battery at about 270 grams 21 g over target weight. I think I should be able to get it sub 250g by using a smaller battery at the expense of flight time.
Problems
Motors start making a beeping sound after ten minutes of testing on the bench - why ?
I don’t understand about radio channel etiquette when flying drones in groups, and what the PIT channel is for in beta flight ?
Also I can’t find the setting for ACRO mode in betaflight, but I can find flight mode HORIZON and flight mode angle ?