Been at it on the 10" for quite a while now (maybe 40-50 flights already) and it is quite a process…
Big shout out to UAV Tech - one of the only source of sparse info about getting those big birds to fly properly. The Chris Rosser tuning method really breaks down above 7" (mostly as the default BF filters and pid balance are optimized around 5" quads so way off for big - or small’ ones) and there are loads of concepts to grasp to make sense of it all.
If only he did put this video out a few weeks ago - would have saved me a motor and action cam - as well as quite a few scary moments
Just started the same process and lost my first prop last week.
I had lots of vibration and noise then a prop destroyed itself. They did feel a bit cheap to be honest so i ordered some 10" HQprops to try. Next step is tuning.
I have a quick question you may be able to help me with.
I have got 20 new li-ion cells 2700mah 18650 for free an was unsure if i should make a 5s or 6s pack with them. Or 2 x smaller 5s packs. I only intend to do cinematic flying and nothing crazy
Best is to test tbh - you can ‘simulate’ running on 5S Liion by running a motor limit on a 6S Lipo (15% for the missing cell and around 10% for the Lipo->Liion to be safe) - and then add the extra weight to get a feel for the quad in those conditions - it will likely feel very sluggish .
First you need to get it to fly properly though - those tests can only be done after that
My advice is to start with i-term on around .8, d-term on around 1.2 and see from there. Short flghts to test motor temparatures - aim is to reach 100% throttle so you can analyse/test your filtering. Then slowly incrementing master slider until motors get too hot or weird motor noises (thrilling).
Then from timid stick mvts slowly increasing speed/deflection and look out for oscillation/bounce back - then watch loads of videos about analysing blackbox logs
This is odd tbh - angle mode can be used for some of the fine tuning steps (see ‘basement tuning’ method) - but should not change the tune characteristics per say compare to acro.
I suppose your gyro calibration is good if it flies acro ok - how are your pid gains?
At last reaching a point where I can just have some fun flying the thing - took a while but learned a lot so hoping the upcoming 13" will not be as difficult to get my head around
Action cam is very close to the front prop tips and wind noise is quite bad but I wanted to share the prop sound - the low pitch is intoxicating (sounds the same in real life ) - sound is a bit muffled as I did put a low pass filter to limit the wind noise.
I should now just need some minor tweaks if I decide to try new props or batteries… pretty sure I did see a Bonka 8S that would be a perfect fit and add quite a kick (those motors are ‘only’ 925kv for 6S)
What battery did you use and what sort of flight time did you get?
I’m planning on doing a little more with my build today. I have converted a new FOC spare drill battery 5s 5.5ah to XT60 to try as i want to see how it handles the weight.
I am using some 5.6Ah 6S (batteries used for 12S X-Class and weights 800g-ish) - and get around 5mn of energetic flying (likely 8-9mn cruising) - but keep in mind this is an acro setup so quad is heavy (2.3kg AUW) and running big 3220 motors (a lot less efficient than a long range setup) https://rotorbuilds.com/build/34007
Thats awsome. It looks like it flies well.
I’m running 5s li-ion for now so less power but may change it to 6s lipo my motors are 3115 900kv
I am looking for slow cruising with O4 pro and no gopro. Ive had a couple of short test flights using 6s lipo 1300mah but as per normal i forgot to hit record
My total weight will be around 1.6kg or if i double up on the batteries 2.2kg but 11000mah
After Many struggles with horrible noise and hot motors i decided to swap to Inav.
funny thing is it flew stright away with the above no longer existing. Im pretty sure i accidently disarmed instead of swapping to Acro
No damage done and got a half decent flight after.
Cool - INav uses completely different default filters - makes sense their default is set towards bigger quads
Funny thing is I did the same thing (disarm while trying to switch angle/acro) a few months back
Manged to get some good flight data today so hopefully i can start tuning it soon.
Have you seen the youtubes on uploading BB files to AI for tuning. It tells you what to tune and why. I suppose its another way of learning or is it cheating. Who knows
I think AI can certainly help with some bits of it - setting up the filters is a pretty ‘mechanical’ affair but it gets complicated for the next steps as to get to the relevant data (for example fine tune the P/D balance) you need to change the flight settings first (not to corrupt the data) and then test a range of specific ratio with specific stick movements to aggregate the correct data. Getting this bit right it arguably harder than the following data analysis and not much AI can helpt with this one.
Some people are trying to script those steps but they are still some way off having a full working solution (PID Tool Box guy has some scripts to run identical ‘basement test runs’ so he can be sure he has the best data possible)
I suppose in a not too distant future we could have an automated tune process tbh (start a program, quad will run its own series of ‘test flights’ and make relevant adjustments in between)
Does not sound as fun though
Type ‘save’ and press Enter after pasting the commands above.
Manus
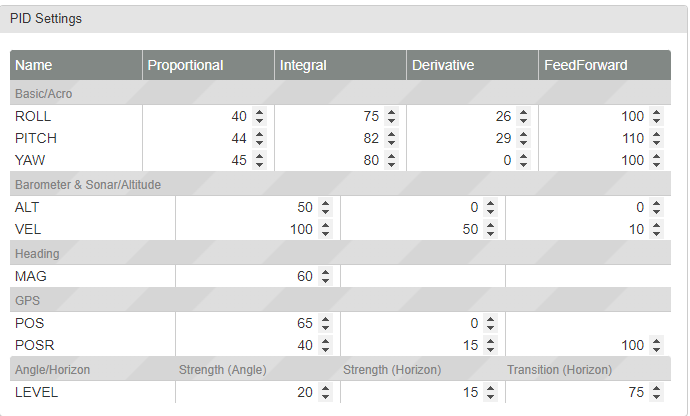
# Current PID Settings (from your screenshot):
# ROLL: P=40, I=75, D=26, F=100
# PITCH: P=44, I=82, D=29, F=110
# YAW: P=45, I=80, D=0, F=100
# --- PID Tuning Recommendations ---
# General Recommendations (CLI commands for these depend on your specific iNav version and setup):
# - Consider implementing or increasing the strength of gyro and D-term filters.
# (e.g., set gyro_lpf_hz = X, set dterm_lpf_hz = Y, or explore dynamic notch filter settings)
# - Address mechanical vibrations (loose components, unbalanced props, motor issues).
# --- Axis-Specific Recommendations ---
# Pitch Axis:
# Recommendation: Consider a slight reduction in I-gain for Pitch.
# Current I-gain for Pitch: 82
# Suggested adjustment: Reduce I-gain by 5-10% (e.g., to 74-78).
# Example CLI command (adjust value as needed):
# set pid_i_pitch = 78
# Yaw Axis:
# Recommendation: Consider a reduction in P-gain for Yaw.
# Current P-gain for Yaw: 45
# Suggested adjustment: Reduce P-gain by 5-10% (e.g., to 40-43).
# Example CLI command (adjust value as needed):
# set pid_p_yaw = 42
# Recommendation: If reducing P-gain introduces more drift, a slight increase in I-gain might be necessary.
# Current I-gain for Yaw: 80
# Example CLI command (adjust value as needed, e.g., increase by 5% to 84):
# set pid_i_yaw = 84
# Recommendation: If oscillations persist after P-gain reduction, consider a slight reduction in I-gain as well.
# Example CLI command (adjust value as needed, e.g., reduce by 5% to 76):
# set pid_i_yaw = 76
# Recommendation: D-term data was not available for Yaw. If possible, enable D-term logging for future analysis.
# If the Yaw feels loose or has slow oscillations, a small amount of D-gain might help, but introduce it cautiously with appropriate filtering.
# Example CLI command (start with a small value, e.g., 5-10, and increase incrementally):
# set pid_d_yaw = 5
This raised alarm bells but it seems to increase the values so maybe it just got confused (P dampens I oscillations and D dampens P oscillations so statement makes little sense )
Some of the analysis is supposed to be done with specific settings - the p/d balance analysis will be messed up if you have some ff in there for example so I am not sure how it gets its numbers tbh.