Hi Karl @notveryprettyboy
I’m not an expert on this and no doubt others will contribute as well but here goes…
Mavlink is a protocol for communicating information from configuration software to flight control boards and then out as telemetry information for ground stations, TX displays, OSD’s etc…
Betaflight, INAV etc. all use the ‘multiwii’ protocol from the early days of Baseflight.
Mavlink, until recently, has been the domain of APM/PX4 systems using Mission Planner or GCS as the configuration tool and ‘sitting’ on platforms such as APM, Pixhawk, CUBE(2.1) etc.
These systems are the prefferred for proffessional applications such as surveying, mapping, SaR, long distance inspection flights etc.
However, recently, and this is the good news. With the introduction of the Chibios OS the Ardupilot (copter/plane/rover/tracker variants) firmware can be loaded onto our traditional 30.5mm square FC boards. which have the advantage of built-in OSD, LED strip, data logging etc.
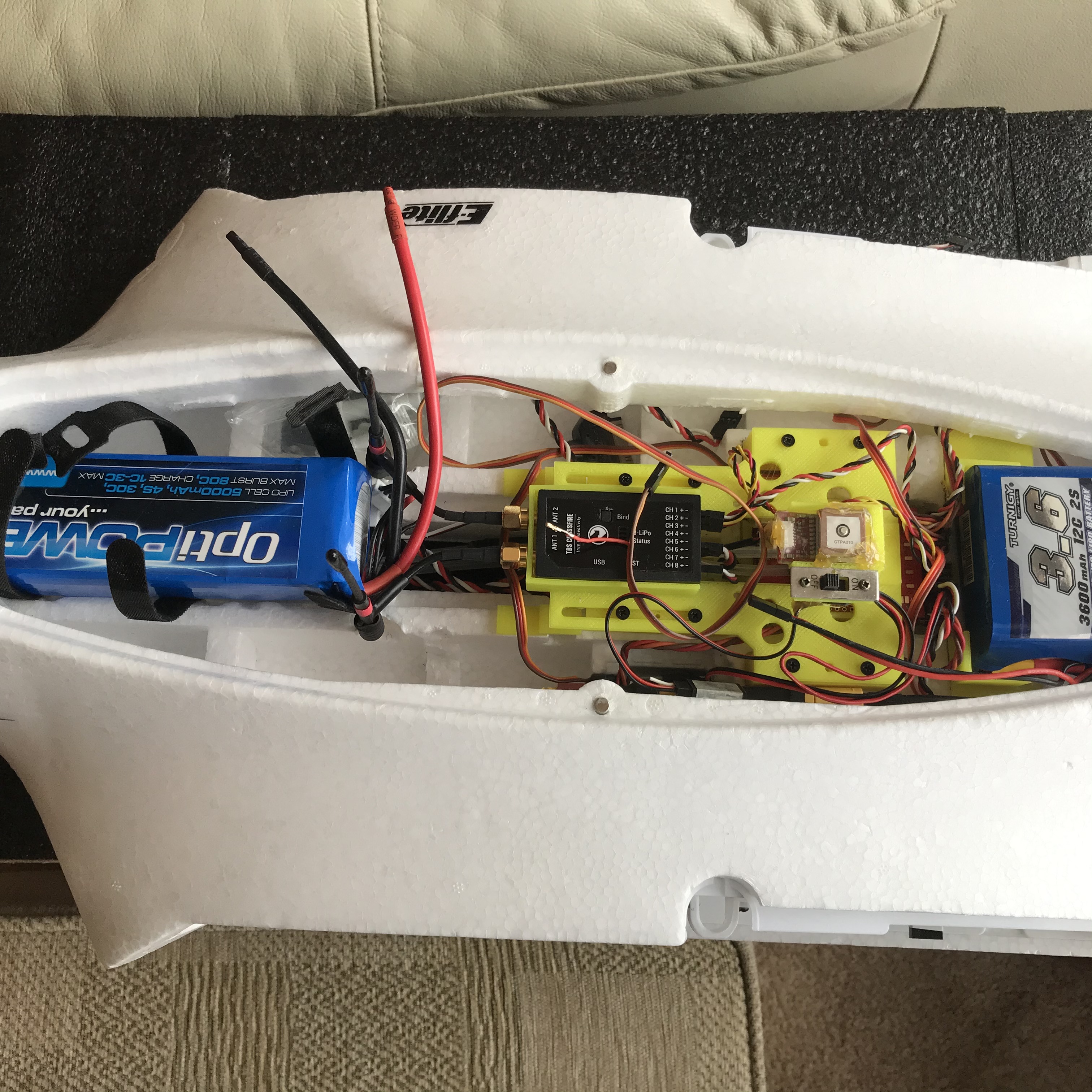
My THEER wing, the black one, has a MATEK wing FC inside it running Arduplane. It was a breeze to install and setup.
These are a few of the common boards that now run MAVLINK protocol systems
Furious FPV F-35 Lightning and Wing FC-10
Holybro Kakute F4
Holybro Kakute F7 AIO
Holybro Kakute F7 Mini (only V1 and V2 are compatible)
Mateksys F405-SE
Mateksys F405-STD and variants*
Mateksys F405-Wing
Mateksys F765-Wing
Mateksys H743-Wing
Omnibus F4 AIO/Pro
Omnibus Nano V6
Omnibus F7 V2
Painless 360 and many others have videos on YT covering install, set-up and mission planning use. There is an enormous community with advice from all levels of use.
Hope this helps mate
See you on the field soon with my ‘Mavlink’ wing 
Cheers
Steve