If you make a point of raising the throttle stick off minimum when disarmed an accidental knock of the arm switch won’t do anything.
As @DeanoG60 says it’s a matter of choice but in six years of doing this stuff I’ve never had a problem with an accidental arm
Everything looks to be behaving as I might expect. I also cross-referenced it with my Nanohawk setup to check the behaviour and they’re basically the same. The only difference is that the Croc seems to not want to arm. I’ve checked switch and gimbal (throttle) positions.
So far as the transmitter is concerned, I did create a new Model for the Croc by copying the Nano. All I have changed so far is the Type because the Nano is FrSky D8 and the Croc is D16. I’ve also set the Failsafe to “No Pulses” (I think). But everything else is the same.
Maybe I’m missing something else that needs tweaking.
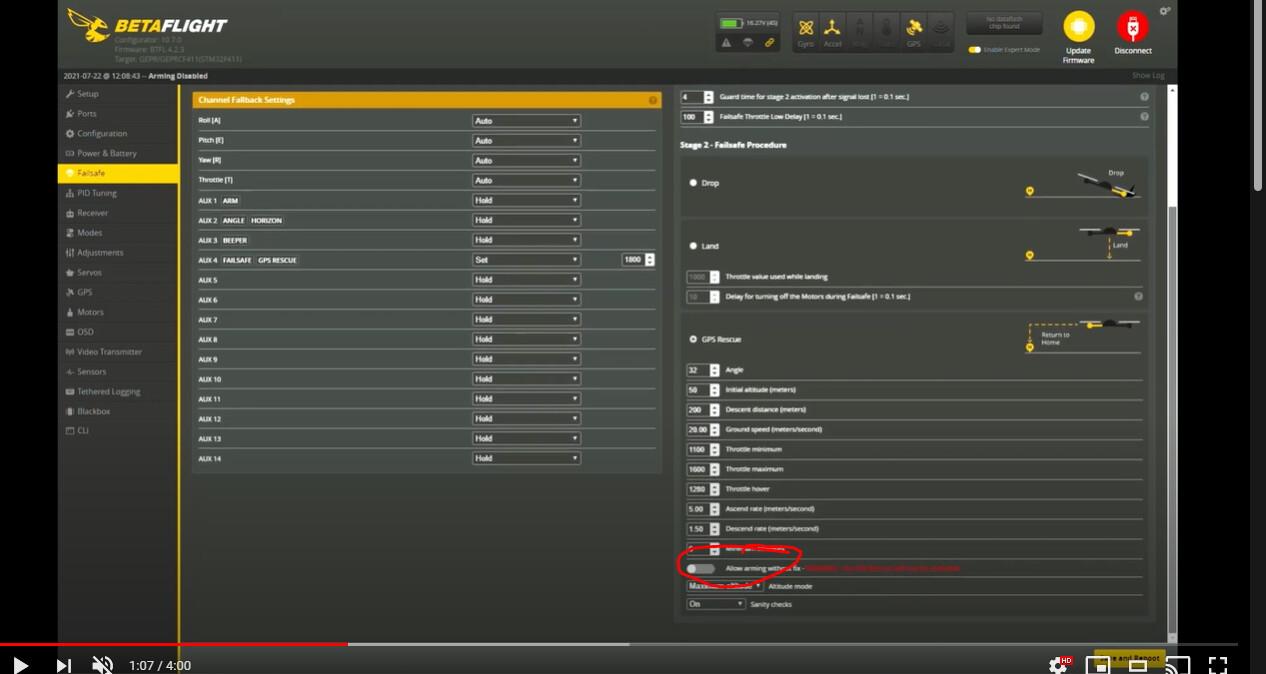
Try arming with the tab highlighted switched off.
This will show you if it does work or not but obviously will not have gps rescue until you switch it back.
Well, thanks in no small part to you guys, we have a flying machine!
I can do enough damage inside with the Nanohawk, so that’s enough of a test for now. Although even in those few seconds I felt confident that I had a reasonable amount of control. I’ll need a nice big space and a spotter for anything more.