I thought I’d document my experience in case it’s ever helpful to anyone.
The story so far…
By way of dipping my toe in the FPV waters, I bought an Emax Nanohawk a few months ago. In an effort to future-proof, rather than buying an all-in-one RTF (Ready To Fly) kit I bought a BNF (Bind ‘N’ Fly) drone, some Fat Shark goggles and a Radiomaster, multi-protocol, OpenTX TX12 transmitter.
Fast forward to a couple of weeks ago and I’ve mastered hovering the little beast indoors, but not much else. Perfect time to spend a couple of hundred quid on another, slightly larger drone and associated paraphernalia. So I did. I went for the FrSky XM+ receiver and CADDX Ratel camera, in the expectation that would be compatible with existing gear.
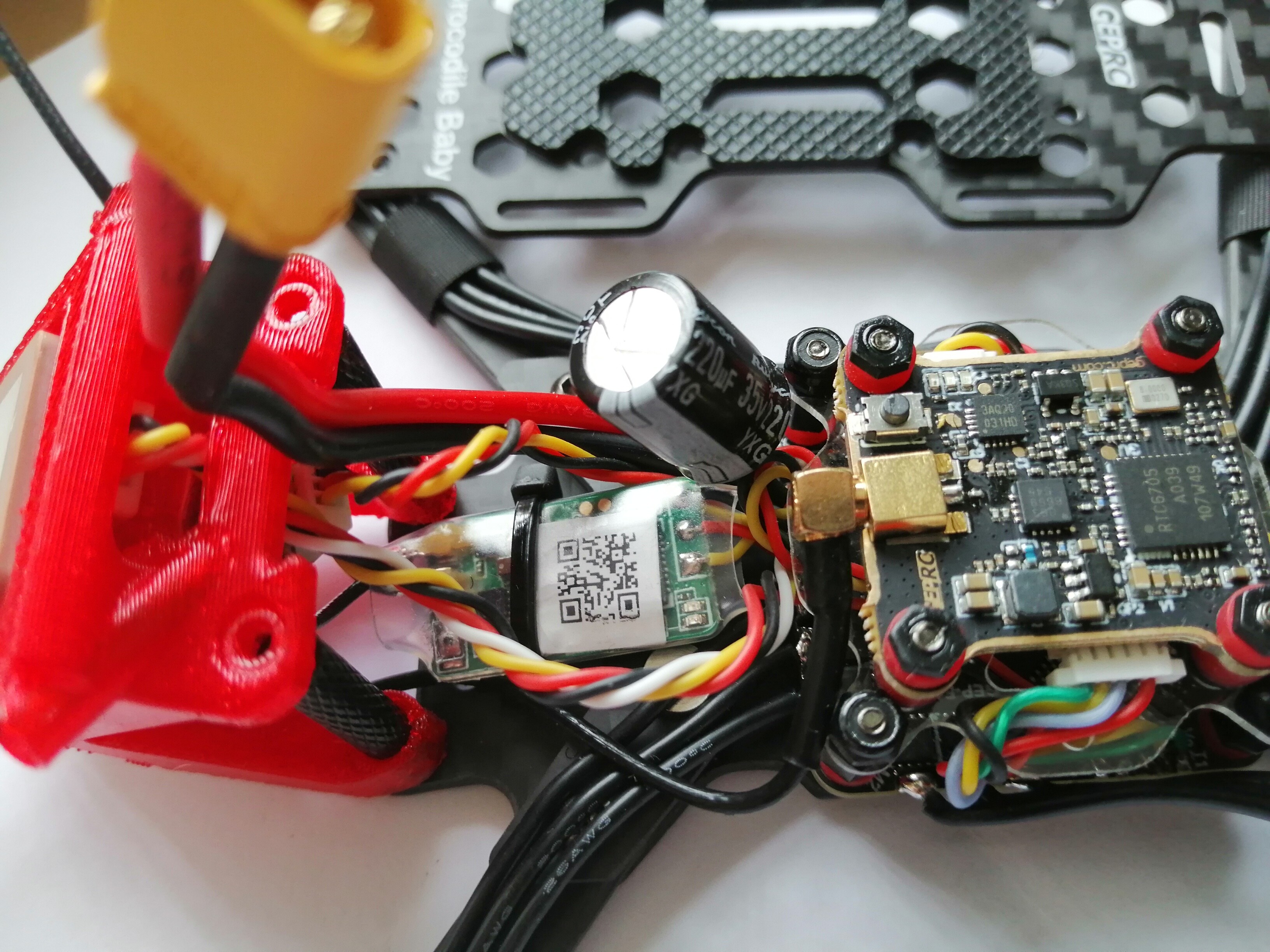
The GEPRC Crocodile Baby only took a week to arrive from Banggood. The battery is taking considerably longer, so I bought an extra, and a B6 style charger, from amazon/eBay.
The first thing I did was fire up BetaFlight on my PC (there’s a post about getting it working with my laptop elsewhere) and plug it in. Everything looks like the default setup is sensible and the motors all spin when tested, so the next task is to get it bound to the transmitter.
I figure the best option here is to copy my Nanohawk model settings and start from there, as I’d like the two to be basically the same control configuration as far as possible. This is easily done on the controller; just go into the Model menu, select the Nanohawk, long-click and select Copy Model from the menu. I can then select the copy as the current model and edit it as required, starting with changing the name.

So the first task is binding to the transmitter. Fortunately there was an extensive FrSky XM+ “Instruction Manual” included…

Step 1 of the binding procedure has the following:
’Turn on the transmitter while holding the F/S button on the module…'
I assume this refers to a FrSky transmitter module which I clearly don’t have as I’m using the TX12, so I’ll replace that with putting that into binding mode.
So, long-press on the “Model” button to get into the model menu, then “Page >” to the “Setup” page and scroll down to the relevant options.

The manual says, ‘FrSky D16 mode’, so that’s obvious, then just go down to “[Bnd]” to start binding.
[ Edit from the future: Turns out there are four options for binding. It’s possible I’ve been choosing the wrong one. More news on this in a subsequent post. ]
Step 2 of the binding procedure says:
’Connect the battery to the XM+ receiver while holding the F/S button on the receiver.'
The diagram at the top shows a black rectangle labelled BIND, so let’s assume that’s the “F/S button”. It’s only about 0.5mm across and tucked away in the frame. Holding that down while plugging in the XT30 connector is going to be a challenge.
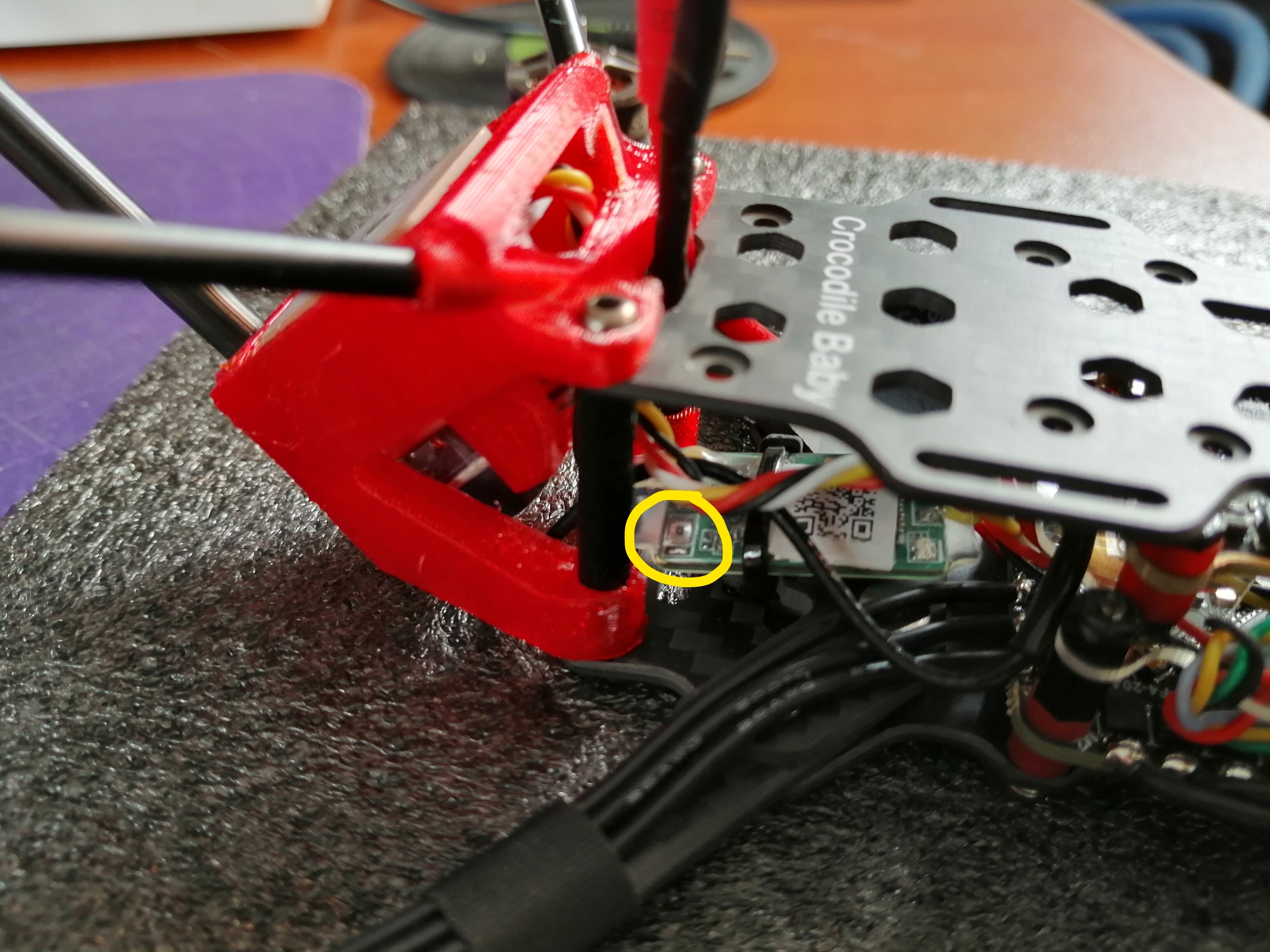
Ah, a crocodile clip (appropriately enough) from my soldering “helping hand” will do. What’s next?
’The LED on the receiver will flash, indicating the binding process is completed.'
Nope, it’s just solid red at the minute. I guess the transmitter may have got bored with trying to bind before I managed to get the receiver powered up. Try activating [Bnd] on the transmitter again. Well, it beeped a few times but nothing else seems to have changed. I’ll try again now I’ve got my hand in powering on the receiver. Un-plug the drone, press the reset button on the self-powered locater/buzzer to shut it up, activate binding on the transmitter again, quickly plug the drone back in…nope, nothing.
OK. So after I replaced the main board in the TX12 I had to rebind the Nanohawk and, unlike the first time, I had to adjust the “Freq tune” to “1” to get it to work. That didn’t seem to help either. Neither did “-1”. There seems to be no limit to the value you can put in this setting and life’s too short for that sort of experiment, so that’s pretty much where I’m at as of now.
On a side note, video transmission is working. 

I haven’t really started doing any research into the binding issue yet, but if anyone has any thoughts I’m happy to hear them.




 Karl very generously offered to do the round trip of picking me up and dropping me off if I thought the drive would be too much me. But with my health currently as is I’d still be an insurance liability on the flight line. My pain levels have been through the roof the last few weeks and unfortunately my doctors think it would be politically incorrect to prescribe me something that works for the fear I may have too much fun with it.
Karl very generously offered to do the round trip of picking me up and dropping me off if I thought the drive would be too much me. But with my health currently as is I’d still be an insurance liability on the flight line. My pain levels have been through the roof the last few weeks and unfortunately my doctors think it would be politically incorrect to prescribe me something that works for the fear I may have too much fun with it.