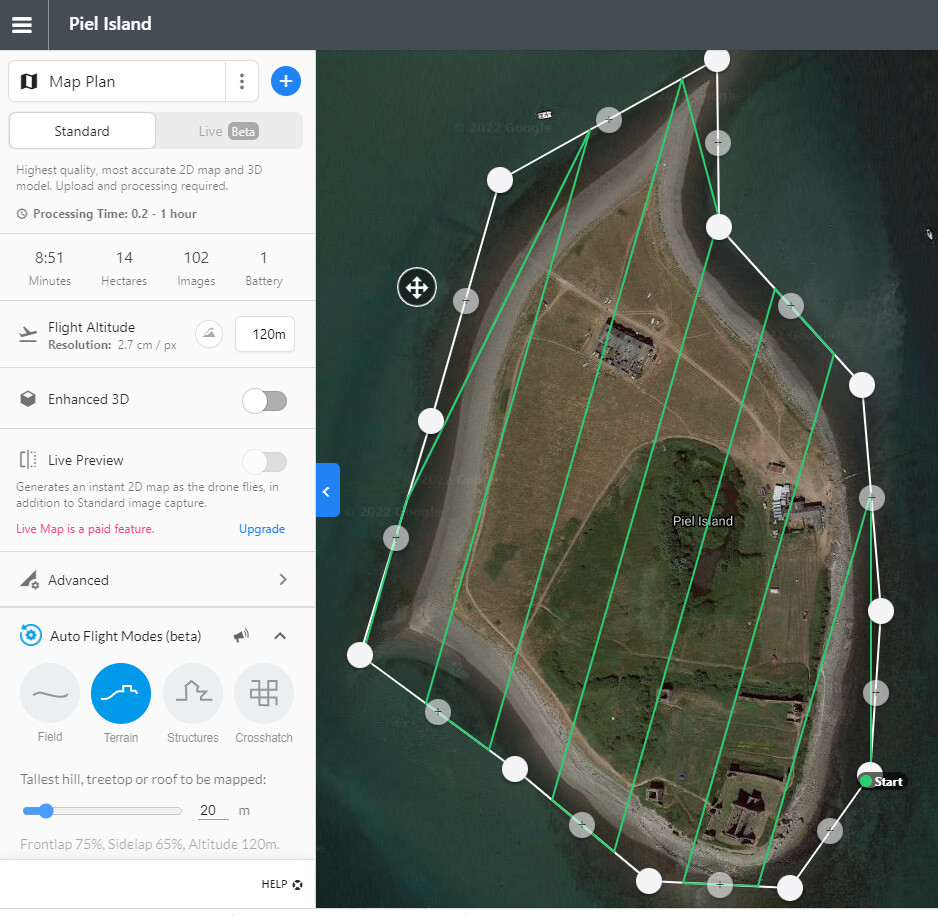
Is there anything specific that Pix4D does that can’t be done in Litchi?
Probably not, but Pix4D and Dronedeploy are easier to use as they’ll calculate the grid/image overlap for optimum stitching results for you (and the UAV being used), whereas as I understand it, in Litchi you’d need to work it out yourself then set each picture waypoint individually.
Thanks for that. Useful info.
Overlap isn’t that difficult to calculate, and I’m thinking in Litchi I’d use time-lapse mode on the camera to take a pic every n secs and move at a pace that is suitable for overlap in the direction of movement.
Might try some time, and then use WebODM and see how it goes.
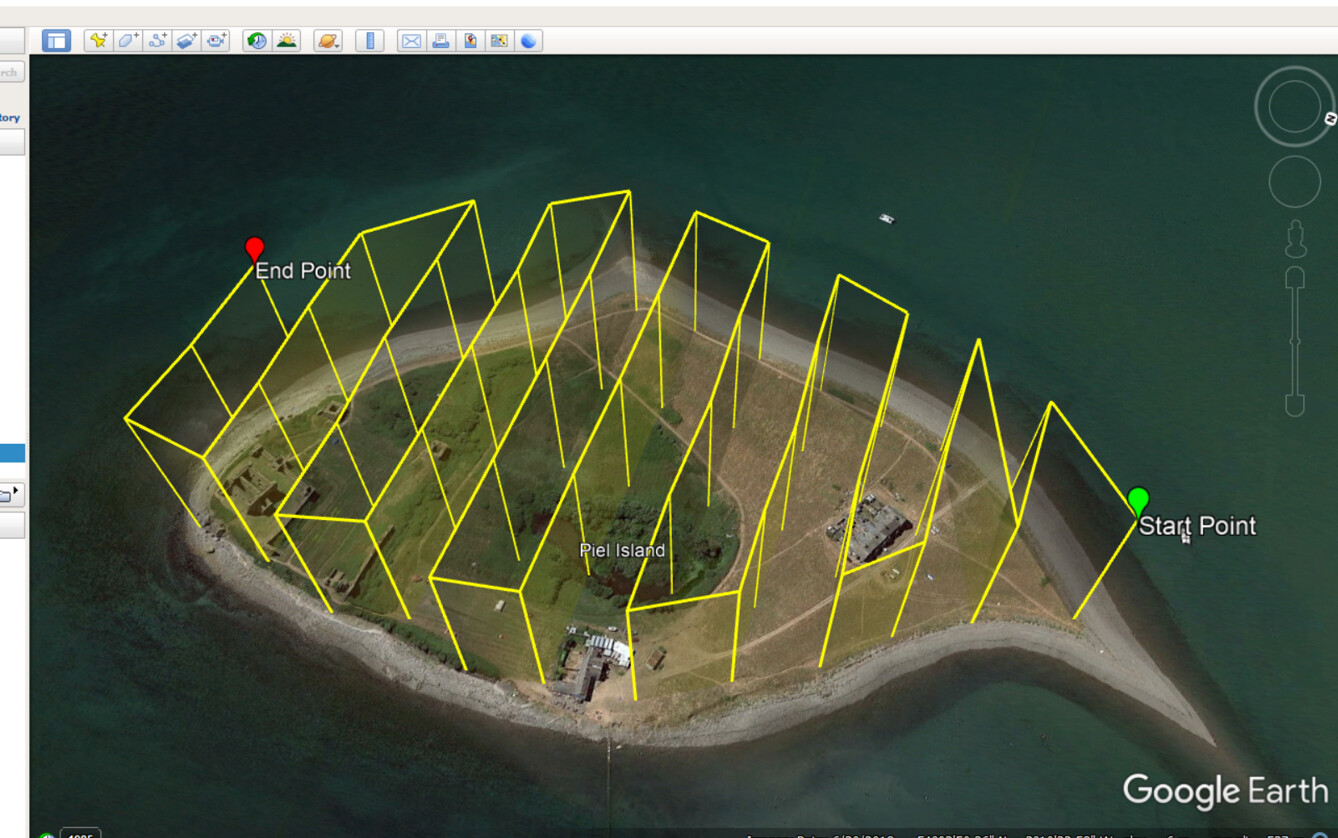
Can the route gpx be exported?
Thats awesome but it doesnt work with the mini2. And for what I needs its also a ridiculous price.
If you can do it with a Mini 2, I’ll be interested to see what the image quality is like - normally mapping is done with a camera with a mechanical shutter (e.g. P4P, Xenmuse) so that it can carry on moving when taking photographs without too much image blur.
I’ve only just started playing with Litchi and a Mini2, If you can ‘pause’ the aircraft at each picture location to take the image / it may be possible to get comparable sharpness, hmmm 
Good point … I’ll check
edit: No 
But Pix4Dmapper still seems to be offering a 15 day free trial !
I think on a good bright day with a fast enough shutter speed, and at a suitable speed, blur wouldn’t be noticed.
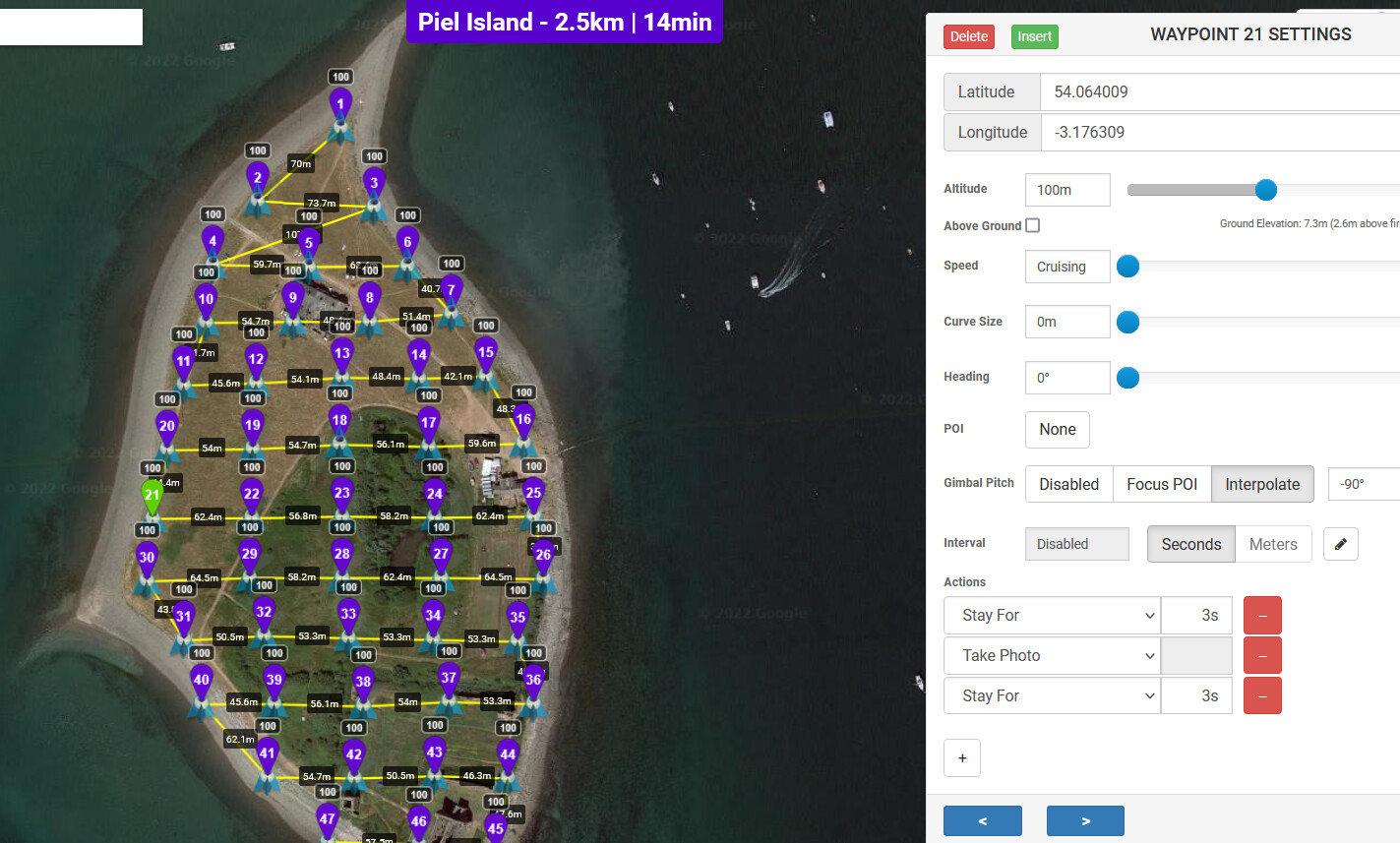
You can pause at waypoints to take pics in Litchi … but there’s a 100 waypoint limit, so limiting the area one can cover. Hence why suggesting using time-lapse mode so that only the turning points of each leg need be specified.
Obviously, a small area can be covered within 100 pics/waypoints.
Definitely worth a try, if a Mini2 can produce reasonable results it opens up loads of new sites to map ![]()
Edit; and the higher the flight, the less relative movement of the ground image on the sensor for a given speed
I don’t necessary want to map it I just want a nice picture.
And nothing wrong with that ![]()
(careful though … at first it’ll be a couple of top down images photoshopped together, then a couple of DroneDeploy missions … but before you know it you’ll be knee deep in QGIS files, surface maps, and trying to work out how you can get your hands on a Zenmuse P1 - UAV load gimbal camera - DJI Enterprise !! )
Do you know me in real life LOL 
That’s exactly what I’d been suggesting further up.
What one needs to do, first, is the calculations to ensure overlaps. That’s where the other platforms help.
Yes, that was just a 5-minute knock together, but it can be done. Its given me an idea to do my local nature reserve
Indeed.
The Mini2 has 83° FOV - from 120m high that’s 78.5m x 58m ground coverage - so the legs need to be max 51m apart along and photos a max 38m apart, along each leg, to ensure 1/3 overlaps.
The Isle of Wight might be a challenge … on one battery.
![]()
It’s more than that. I have one framed the imperial War museum north and its wider than 78 meters.
Ah - I missed the “x 2” bit at the end of the maths.
83° FOV is the diagonal angle
Ground diagonal = drone height x tan(FOV ° / 2) x 2
=120 x tan(41.5°) x 2 = 212m
4:3 sensor means that’s 169m wide x 127 high
So the legs need to be max 113m apart along and photos a max 84m apart, along each leg, to ensure 1/3 overlaps.