Jumper T-Lite Transmitter (4in1)
Emax TinyHawk II Freestyle BNF
binding issues.
Done bind_rx in CLI confirms binding but no confirmation to say complete even thou the control after me pressing the bad on transmitter setup receiver in pic I uploaded. Unsure on other settings apart from on transmitter set it to frysky D8
Betaflight receiver is seen and can see it testing the drone still spin it like a washing machine on 1200rpm
I know it’s connected to the drone when disconnected from laptop and running of the battery as if I goto turn off the transmitter it gives me a warning and rumbles and if I switch off the drone transmitter rumbles and if I switch transmitter off no warnings just straight off.
But apart from that nothing I do with sticks it will not arm
@DeanoG60 wow wow wow I wish I had him as a teacher as I would not been having the wagman chasing me all over Shrewsbury in my school days.
By 25 mins I understood my mistakes or more like lack of understanding as he makes it so simple to understand,
I was pulling my hair out as I wanted to do it without asking as I’ve got really lazy asking before searching so I googled watched loads of videos and posts and still baffled as I ever squinting a blurred screen or they waffled I came back here and thought do a search and read some threads got defeated, i had to walk dogs make her highness a cup of arsenic sorry meant green tea and admit defeat and post here.
I was joking about the washing machine it was just me saying when testing it I could not even keep that the right way up yes all the bars moved except the modes which arm the wifey sorry that’s the tinyhawks name as it’s a bitch to me atm.
Thanks I really do appreciate it and understand why you praise this Joshua Bardwell so much.
One thing to be aware of with the Freestyle in its standard factory setup. Do not fly too far away from yourself. The inbuilt SPI receiver is not the greatest and it will failsafe at anything more than a 100ft. This isn’t the fault of the THFS it’s true of nearly any quad using an SPI receiver. I have an Eachine Twig that would failsafe at much less than 100ft.
At some point you may want to add your own receiver. This will require some delicate soldering (I hope you’re still practising ). There are many options. A lot of the guys on here, including myself, have gone for long range systems such as Crossfire, or in my case IRCGhost, for no other reason than we already had the kit. You could add a FrSky micro receiver such as the R-XSR. Personally I’ve become quite enamoured with the Radiomaster R81 D8 SBUS receiver. These are cheap as chips at £6 from Unmannedtech and are as good as anything from FrSky in the same size. It will also bind to your Jumper T-Lite exactly the same as the built in receiver on your TinyHawk FS.
The above is just something to think about as you become more proficient and you want to explore further. Other than adding a Ghost receiver to my THFS I haven’t done any other modding. But when you start to feel the urge to mod Karl and Deano are your goto guys if you want to go extreme
Hi thanks for replys but at the moment I’ve spent hours and hours at this, I’ve followed JB to a T and nothing works I’ve removed the modes he suggested and just kept arm mode and definitely tried both ways, I did get motors running for split second then flicked the arm mode switch to stop but never again I thought there be a certain stick control movement and done everything position possible and my thumbs are sore now.
I went to motors as JB showed and they will not start.
Set all inputs from 1000 to 2000
I’ve done firmware.
Definitely controller is binded and do see when I’ve tried to start it I can see lights changing.
Im baffled
I thought this be bind and fly like a bind button on the controller and drone then fly, it took 2 seconds for drone to goggles
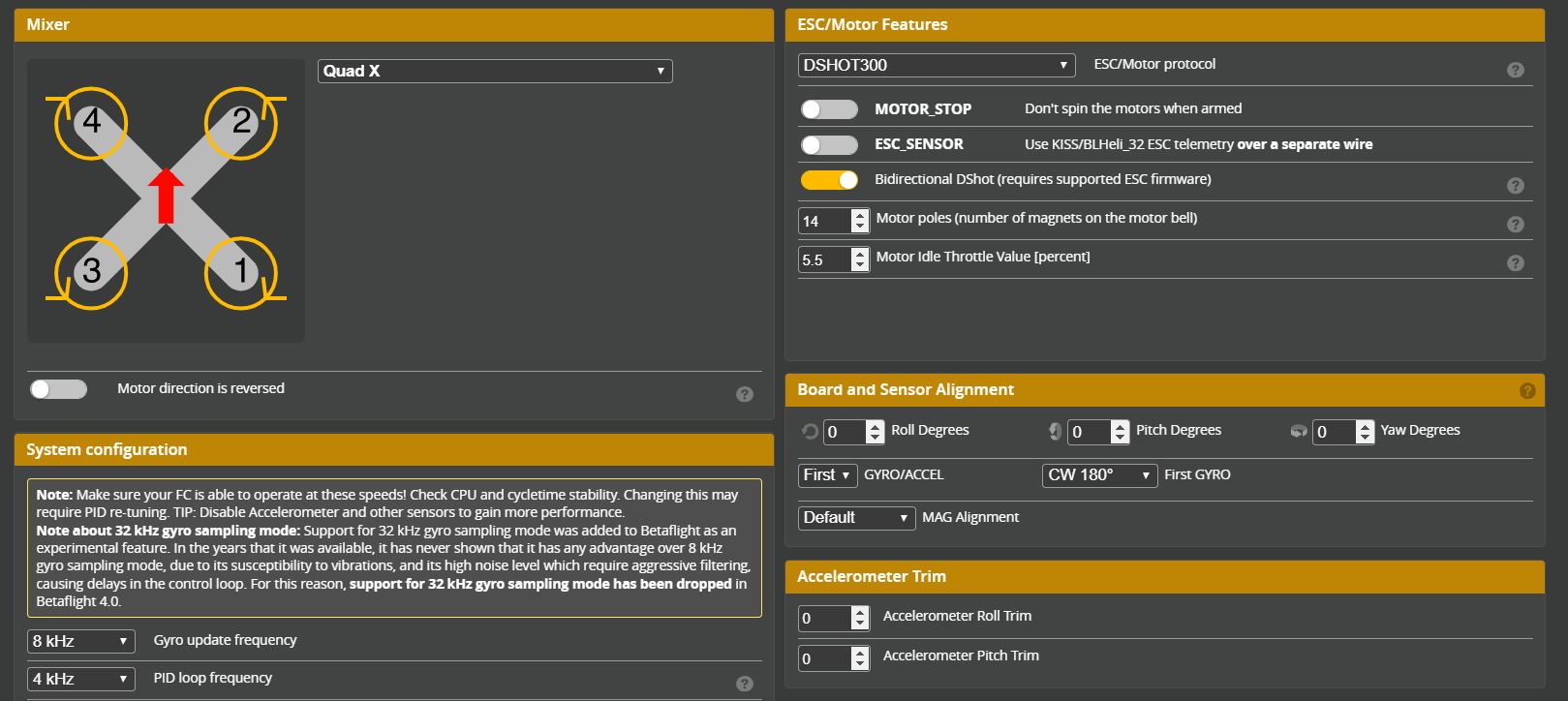
Second is a problem with rpm filtering and is usually an issue with esc setup. It could be bidirectional dshot enabled and your esc does not support it. I’m not sure on your quad though. @DeanoG60 will know more.
I spent 2 full nights and days fuffing around this and while have a it’s where I think best I thought pack up and sell, thought waste of hours on the simulator.
I was going to buy a DJI FPV and fly high and do FPV 400ft in the air in fear I break it.
Thanks guys now back in box and continue on simulator.
Bardwells video was setting up a completely different quad lol only wanted you to follow the receiver and modes setup part of the video as that’s the same on most quads lol
Sorry was my bad I didn’t make that clear when I posted the video.












 ). There are many options. A lot of the guys on here, including myself, have gone for long range systems such as Crossfire, or in my case IRCGhost, for no other reason than we already had the kit. You could add a FrSky micro receiver such as the R-XSR. Personally I’ve become quite enamoured with the Radiomaster R81 D8 SBUS receiver. These are cheap as chips at £6 from Unmannedtech and are as good as anything from FrSky in the same size. It will also bind to your Jumper T-Lite exactly the same as the built in receiver on your TinyHawk FS.
). There are many options. A lot of the guys on here, including myself, have gone for long range systems such as Crossfire, or in my case IRCGhost, for no other reason than we already had the kit. You could add a FrSky micro receiver such as the R-XSR. Personally I’ve become quite enamoured with the Radiomaster R81 D8 SBUS receiver. These are cheap as chips at £6 from Unmannedtech and are as good as anything from FrSky in the same size. It will also bind to your Jumper T-Lite exactly the same as the built in receiver on your TinyHawk FS.













 it’s where I think best
it’s where I think best 