There is a minimum idle speed setting I believe too @Yith so could be something like that
1 Like
I found quite a bit about this effect when searching for “betaflight minimum idle”, some reporting exactly the problem you are seeing.
Quite a few suggest calibrating your ESCs…
https://www.google.com/search?q=betaflight+minimum+idle+site:www.reddit.com&rlz=1C1GCEB_enGB965GB965&sxsrf=APq-WBuuYxRe7c_5yi83DOZlO40cfCbGaA:1643389407870&sa=X&ved=2ahUKEwj-h4jP9tT1AhWAJzQIHYiSDz0QrQIoBHoECDEQBQ&biw=1920&bih=1089&dpr=1
One suggested this video… looks like he’s doing basically what you mentioned in an earlier post.

Others suggested setting minimum idle…
The minimum idle/agressive air mode thing certainly sounds plausible. I did wonder if at minimum motor speed the props simply create too much lift for it to stay on the ground but I don’t think that’s the case. It weighs 800g and they spin gently in acro mode before you start to increase the throttle, then it shoots up and dropping the throttle doesn’t bring the motor speed back down again. It took quite a lot of throttle with 4S and 5" props to get it hovering.
Just dumped the kids at grandparents and now have a night out with Mrs_MK, so I should really put the drones away for a bit 
Will investigate the info above in the momrning. Ta!
1 Like
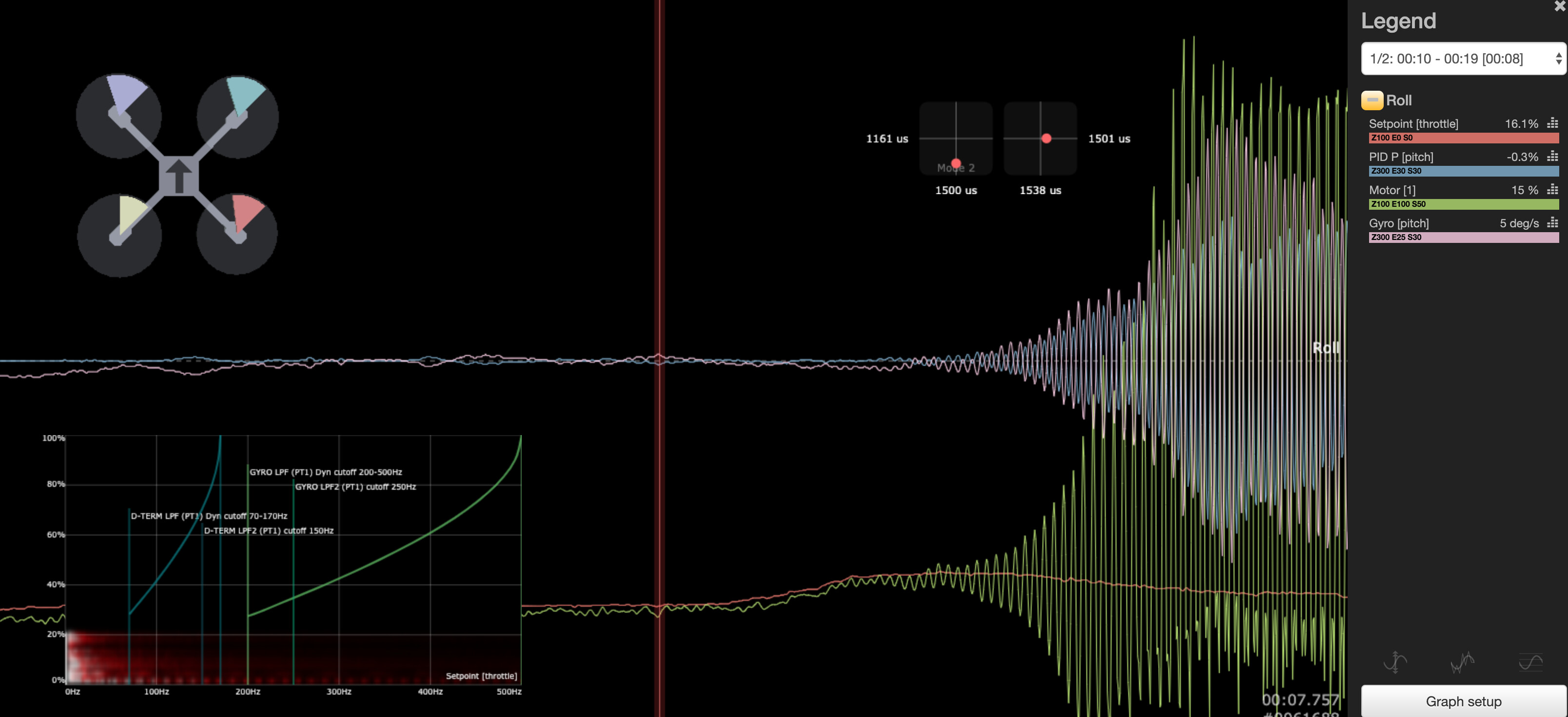
Having a quick look at the logs
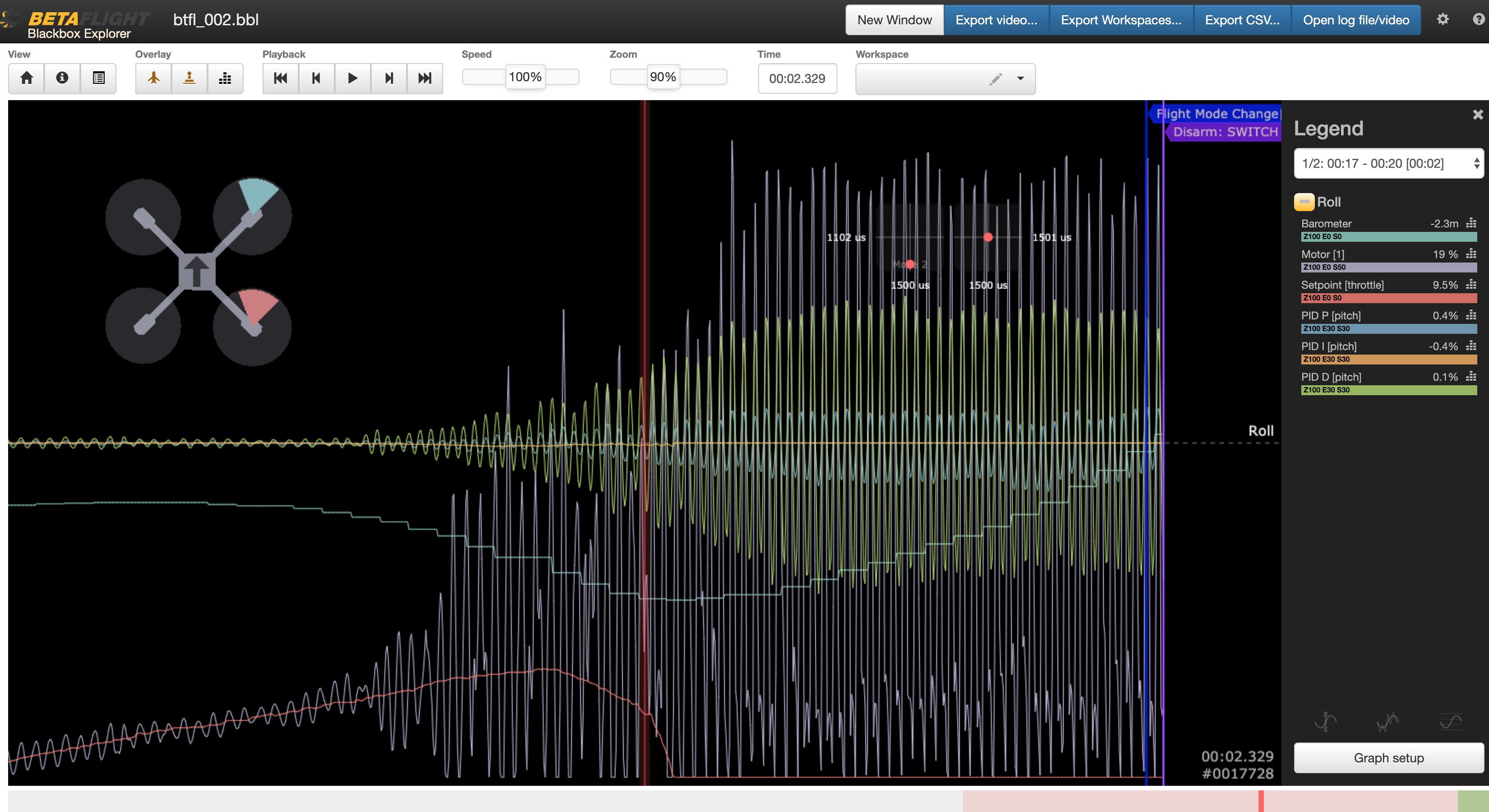
The motors (I only displayed Motor 1) are going nuts, from 0% to about 70% back and forth. You can see the red line of me slowly increasing the throttle, then dropping it again. P & D (for pitch, but others the same) also going nuts.
I’ll pop out in a sec and try dropping the Master PID slider down from 1.0 to about 0.6 and see what happens. After that I’ll try increasing the filtering.
I also notice the barometer does something weird and starts to go down as I increase the throttle, before then rising after I drop the throttle and the quad climbs. Bit odd, although prob nothing to worry about right now.
I guess the question here is - is excessive PID activity causing the motors to pulsate, or are pulsating motors causing excessive PID activity?
Looking at this, the P term (for pitch) is completely out of sync with gyro, constantly overcorrecting in a perpetual P-term oscillation, causing the motors work harder and harder
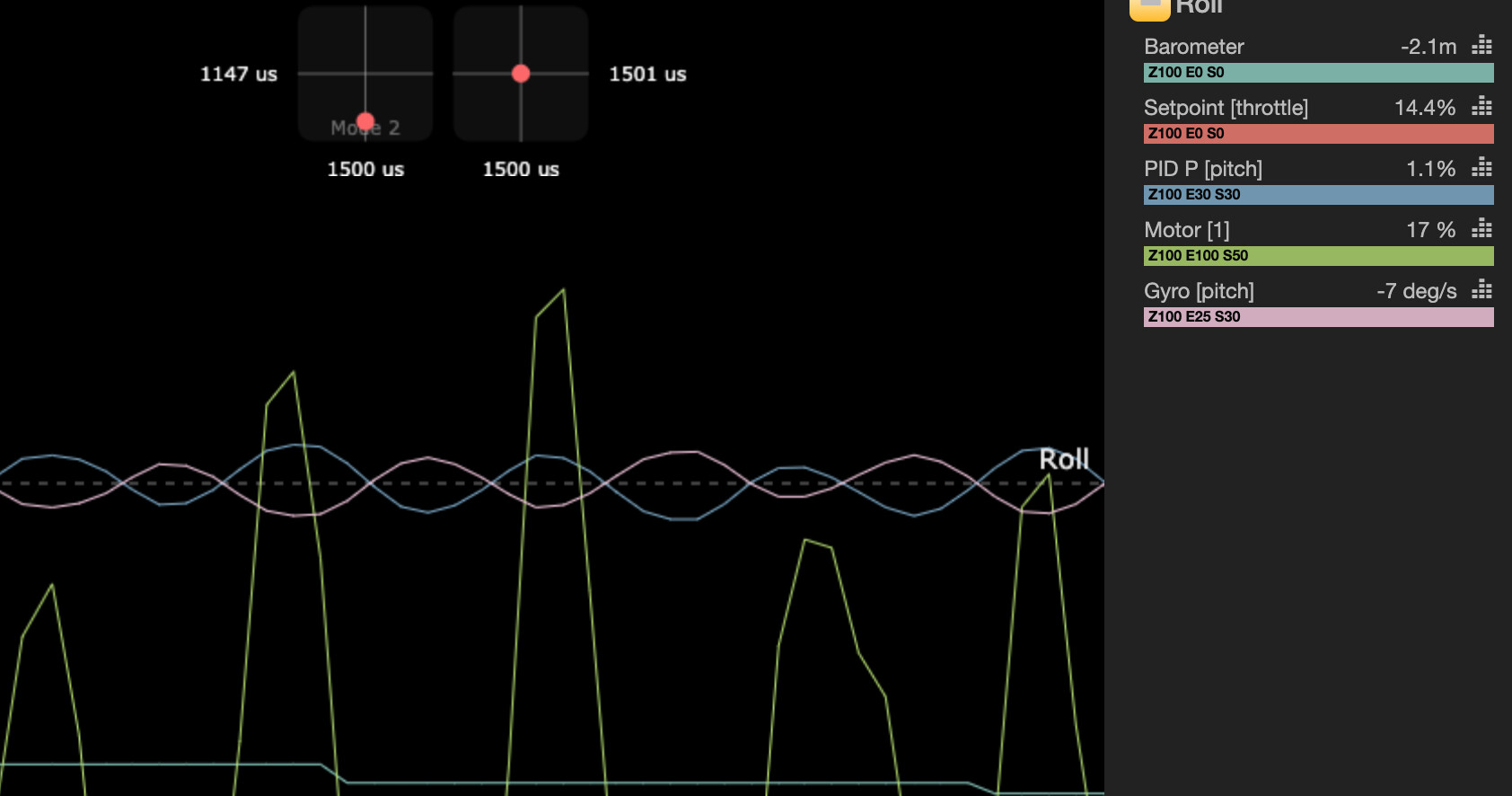
So, master PID gain slider down to 0.6
At low throttle things start to look a bit more normal and I can hover at low throttle - yay!
There are some motor oscillations going on though
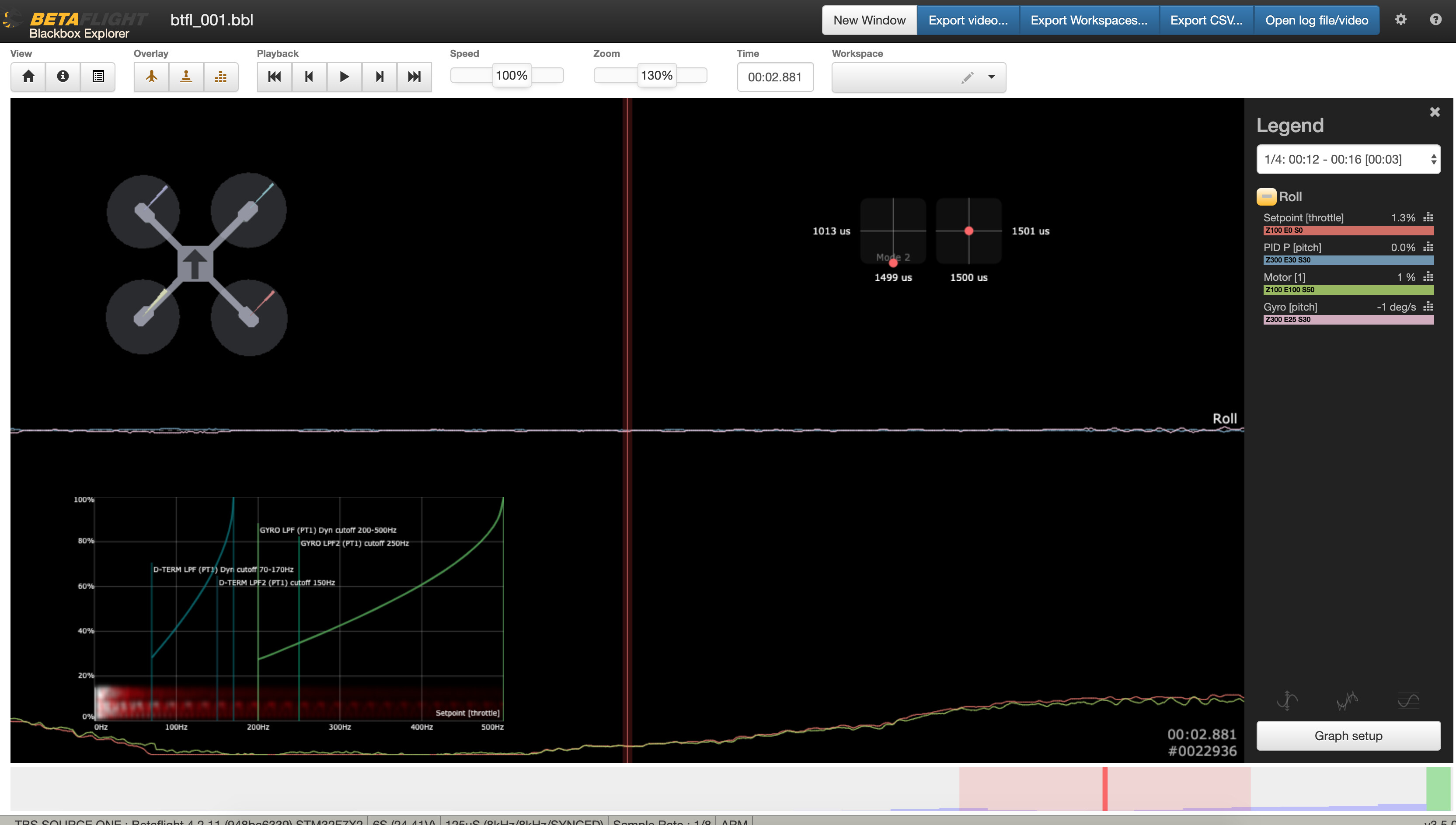
This repeating harmonic vibrations in the bottom left graph concern me a little too and strike me as something that could be eliminated using the gyro filtering if I understood it well enough. From here on I think I’m going to have to continue to tweak things in a big open field because I can’t really test anything more than 16% hover throttle in my garden. 16%!!
What a pain - it doesn’t fill me with confidence that this thing is not going to be cruising along and then suddenly head for the moon with no warning
My money is on the props causing vibrations. You said it works fine with 5" props. What props are you using? And do you have any different props maybe with a shallower pitch?
Some brand new HQ 7035s. I also have some Gemfan 7040s here, might try those.
Worth a try. Also are all your motor screws and frame screws etc tight?
You’ve got foam on the baro ? ![]()
![]()
Tried the Gemfan 7040 props.
Hovers at very light throttle, then as you increase the throttle a touch it goes wild and shoots up again
Also tried dropping the gyro filter slider to 0.75 (more filtering), still does the same thing.
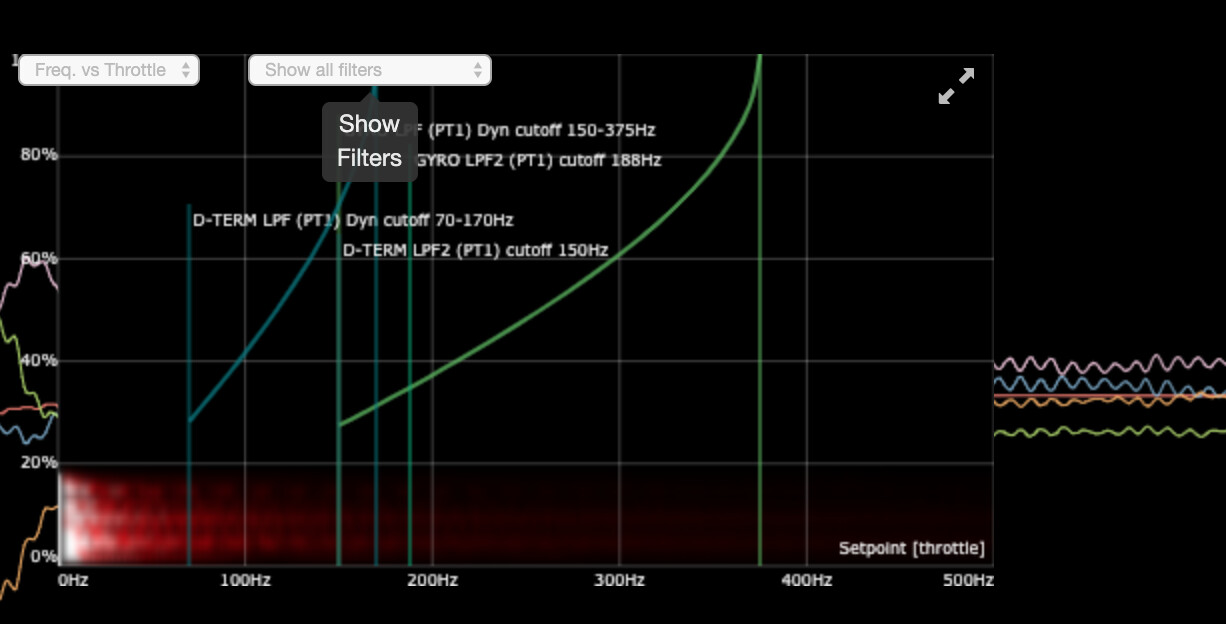
There’s definitely some vibration somewhere- that little bottom left graph shows something happening at very clear multiples of about 20hz.
I wonder if these monster motors are part of the problem. I’m convinced it could be tuned to fly well by an expert, but I can’t see me being able to fiddle about with some sliders to the point that I feel confident it’s safe to fly. I could try dropping the PID slider (or the P term) even further, but it’s already quite far away from the default.
No, it’s built into the FC I think. I could try just disabling it - gonna try that now…
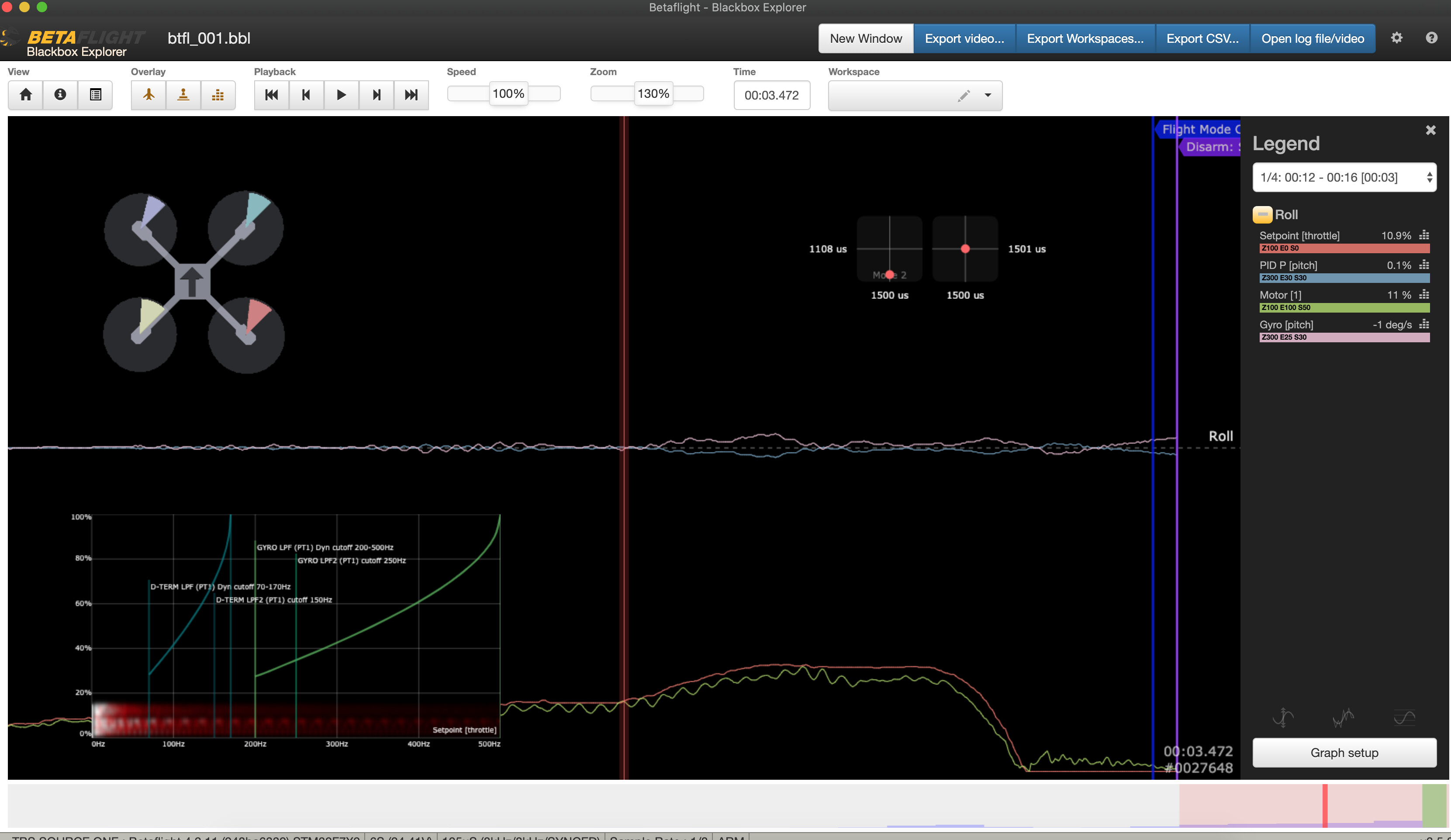
Another quick hover - baro off and PID slider down to 0.5 (I know, I know, two changes at once). Much more stable, but I’m sure this is the effect of the PIDs. Still some oscillations in the logs, but not as bad as before.
Less obvious repeating vibrations than before. I’m sure they’re a result of excessive P-Term. The motors have so much torque, they don’t need anywhere near as much P to correct for errors.
Problem is, 0.5 on the slider is as low as it goes - from here it’ll have to be a case of trying specific numerical P, I and D values.
I might go back to BF 4.3 since the PID adjustments are much easier - not just from the software but also in the OSD, so I can more quickly change things through the goggles in the field. I need a sunny day, an empty field and an hour or so. Probably start with very low P values, like single figures. Grrr.
Apologies for the endless graphs and musings, this thread is helpful for me to get my thoughts down and go back and see what I’ve done 
2 Likes
Have a look at your sensors tab? You might just have a bad noisy gyro. I did once on a kakute f7
Cheers will do. I did another quick hover now - noticed that as well as the master gain slider which is now down to 0.5, there is also the P/D gain slider which I took down from 1.0 to 0.75. The trace looks a lot smoother now, although still some minor oscillations. More to come when I get some time - probably in the week now.
Here’s a thought…
I’ve seen mention of the TBS Source One 7" being available in deadcat or standard X configs. I’ve only ever seen the 7" arms being sold as a single item from UK stockists though, never seen an option for different configs
When assembling the frame, I figured you could flip the arms around to give slightly different geometries, since there is a slight bend in the arms where they mount, so you can have them pointing forwards a bit or backwards a bit. Two of the arms also have slightly more bend than the other two. I arranged the arms so the front arms bend back a lot to get them out of view and the rear arms bend back slightly - giving a soft of deadcat configuration, but not as obviously so as other setups I’ve seen.
Looking at the photo below, the front and rear props come very close to each other, where as side-to-side there is a large gap

What are the odds I’ve assembled the frame wrong and this uneven front to back vs side to side layout is confusing the hell out of the PID routine? If nothing else, increasing the spacing from front to back props would reduce the pitch authority and give the drone more pitch inertia, reducing the chances of PID overshoot. Maybe.
Unlikely, I’ve messed with various frame configurations away from a true X and never had any issues.
Always seem to compensate for what I imagine is not a big change considering the torques involved
IMHO
Steve ![]()
1 Like
Yeah I think you’re right, now I’ve had a chance to ponder it a bit more.
Who was it above that mentioned checking the gyro trace in BF configurator? Just had a look now, it’s flickering a lot between 0 and these sorts of numbers
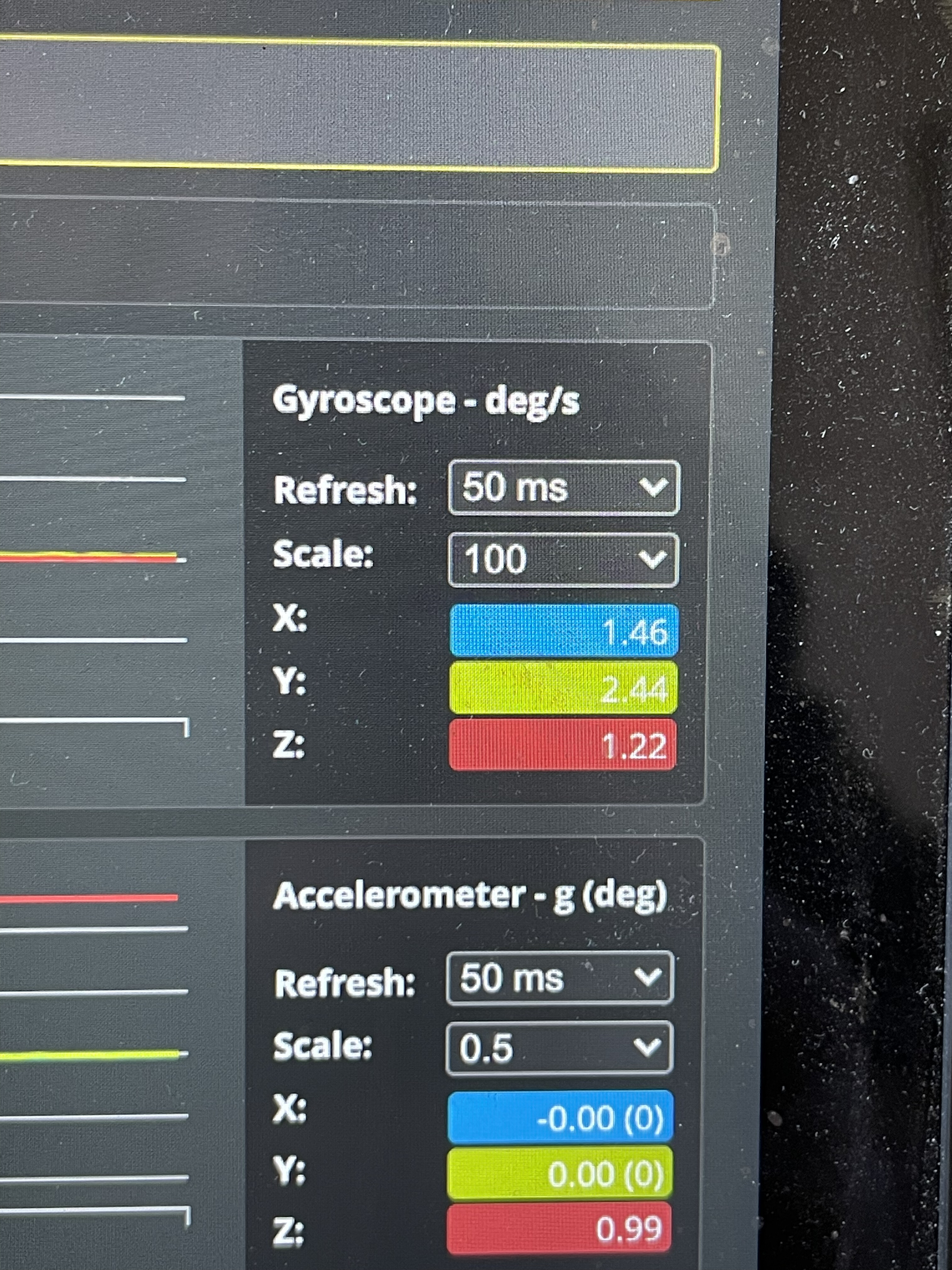
Could it be a duff gyro? I need to plug in my Nazgul and see whether that level of flicker is normal.
Edit: The Nazgul flickers up to about 0.5. But then I plugged the 7" back in and it’s only also flickering to about 0.5 now. So perhaps not this. Grrrr